










<--返回「Autosar_MCAL高阶配置」专栏主页-->
目录(共10页精讲,基于评估板: NXP S32K312EVB-Q172,手把手教你S32K3从入门到精通)
实现的架构:基于MCAL层
前期准备工作:
评估板: NXP S32K312EVB-Q172通用开发板
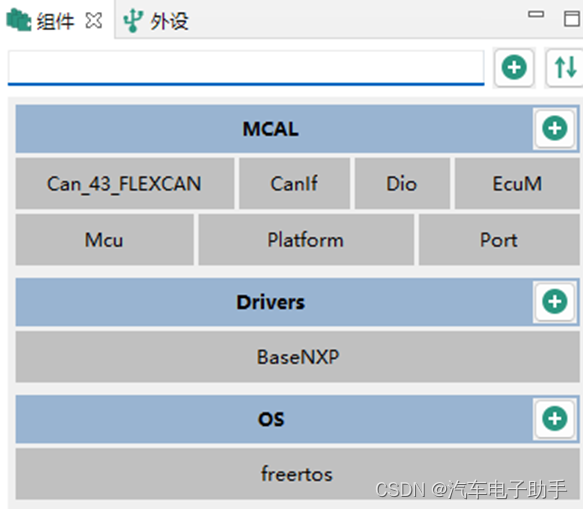
 本文介绍了基于MCAL层在NXP S32K312EVB-Q172开发板上配置CAN外设,接收Standard Frame和Extended Frame的过程。详细讲解了CanHardwareObject和CanIf模块的配置,以及如何生成和使用驱动代码。
本文介绍了基于MCAL层在NXP S32K312EVB-Q172开发板上配置CAN外设,接收Standard Frame和Extended Frame的过程。详细讲解了CanHardwareObject和CanIf模块的配置,以及如何生成和使用驱动代码。
<--返回「Autosar_MCAL高阶配置」专栏主页-->
目录(共10页精讲,基于评估板: NXP S32K312EVB-Q172,手把手教你S32K3从入门到精通)
评估板: NXP S32K312EVB-Q172通用开发板
 2961
7355
2961
7355

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文

























