







 本文介绍如何卸载Kinect传感器驱动,并通过ROS安装OpenNI相机和启动程序。此外,还详细说明了使用ROS进行Kinect RGB及深度摄像头的校准过程,包括所需参数的获取。
本文介绍如何卸载Kinect传感器驱动,并通过ROS安装OpenNI相机和启动程序。此外,还详细说明了使用ROS进行Kinect RGB及深度摄像头的校准过程,包括所需参数的获取。
1. remove libfreenect kinnectsensor driver
seamanj@seamanj-Blade:~/Software/SensorKinect/Platform/Linux/Redist/Sensor-Bin-Linux-x64-v5.1.2.1$ sudo ./install.sh -u
[sudo] password for seamanj:
Uninstalling PrimeSense Sensor
******************************
unregistering module 'libXnDeviceSensorV2KM.so' from OpenNI...OK
unregistering module 'libXnDeviceFile.so' from OpenNI...OK
removing shared libraries...OK
removing executables...OK
removing config dir...OK
removing usb rules...OK
removing modprobe blacklist...OK
*** DONE ***
再次运行NiViewer确定驱动已卸载
seamanj@seamanj-Blade:~/Software/OpenNI/Platform/Linux/Bin/x64-Release$ ./NiViewer
Open failed: Bad Parameter sent to the device!
Press any key to continue . . .
^C
download check image from:
http://wiki.ros.org/camera_calibration/Tutorials/MonocularCalibration?action=AttachFile&do=view&target=check-108.pdf
2
sudo apt-get install ros-kinetic-openni-camera
sudo apt-get install ros-kinetic-openni-launchhttps://answers.ros.org/question/207642/freenect_launch-with-kinect/
2.
roslaunch openni_launch openni.launch
to open server
3. open another terminal
rosrun camera_calibration cameracalibrator.py image:=/camera/rgb/image_raw camera:=/camera/rgb --size 8x6 --square 0.108
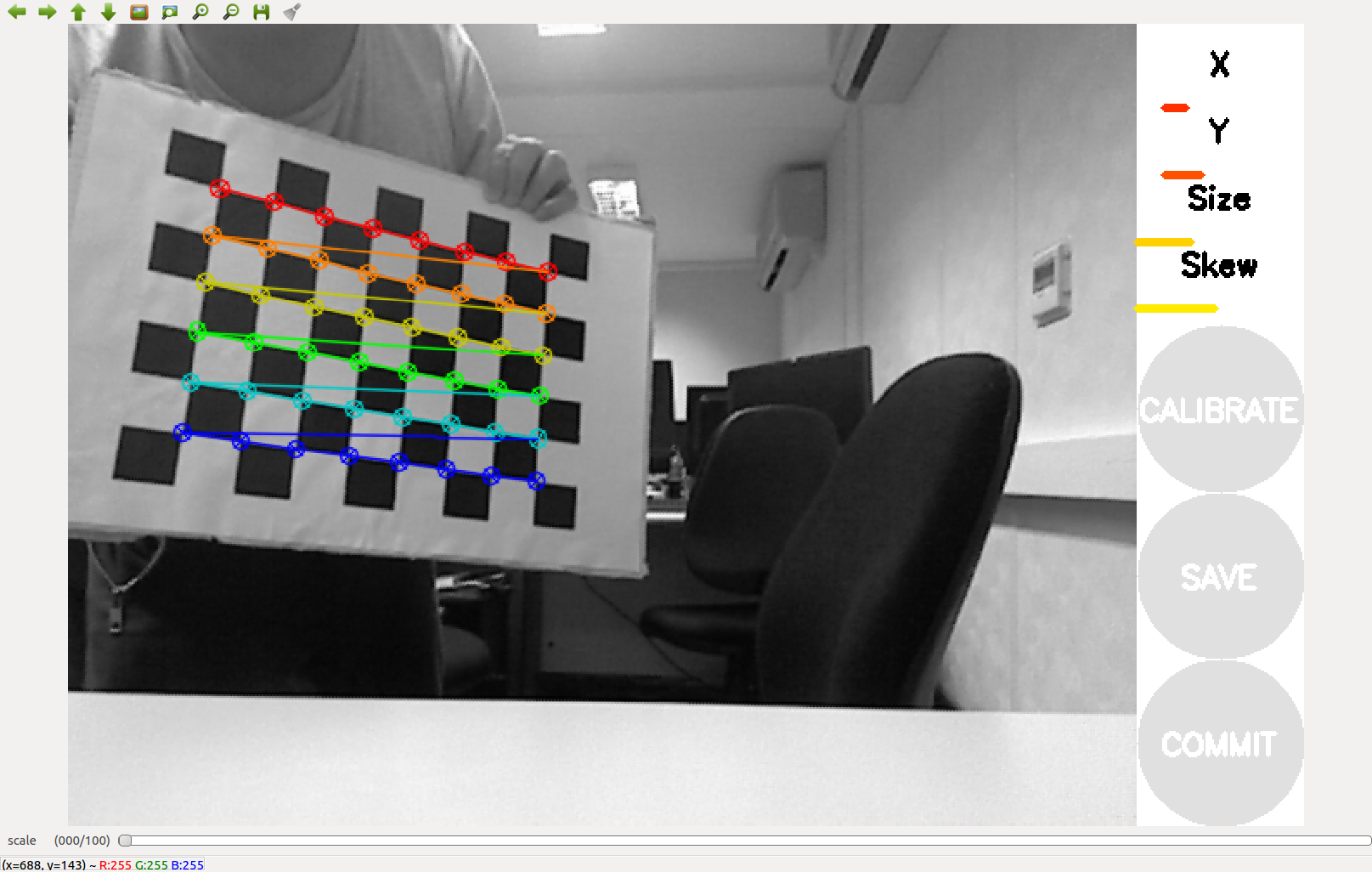
click calibrate when it is enabled.
after a while
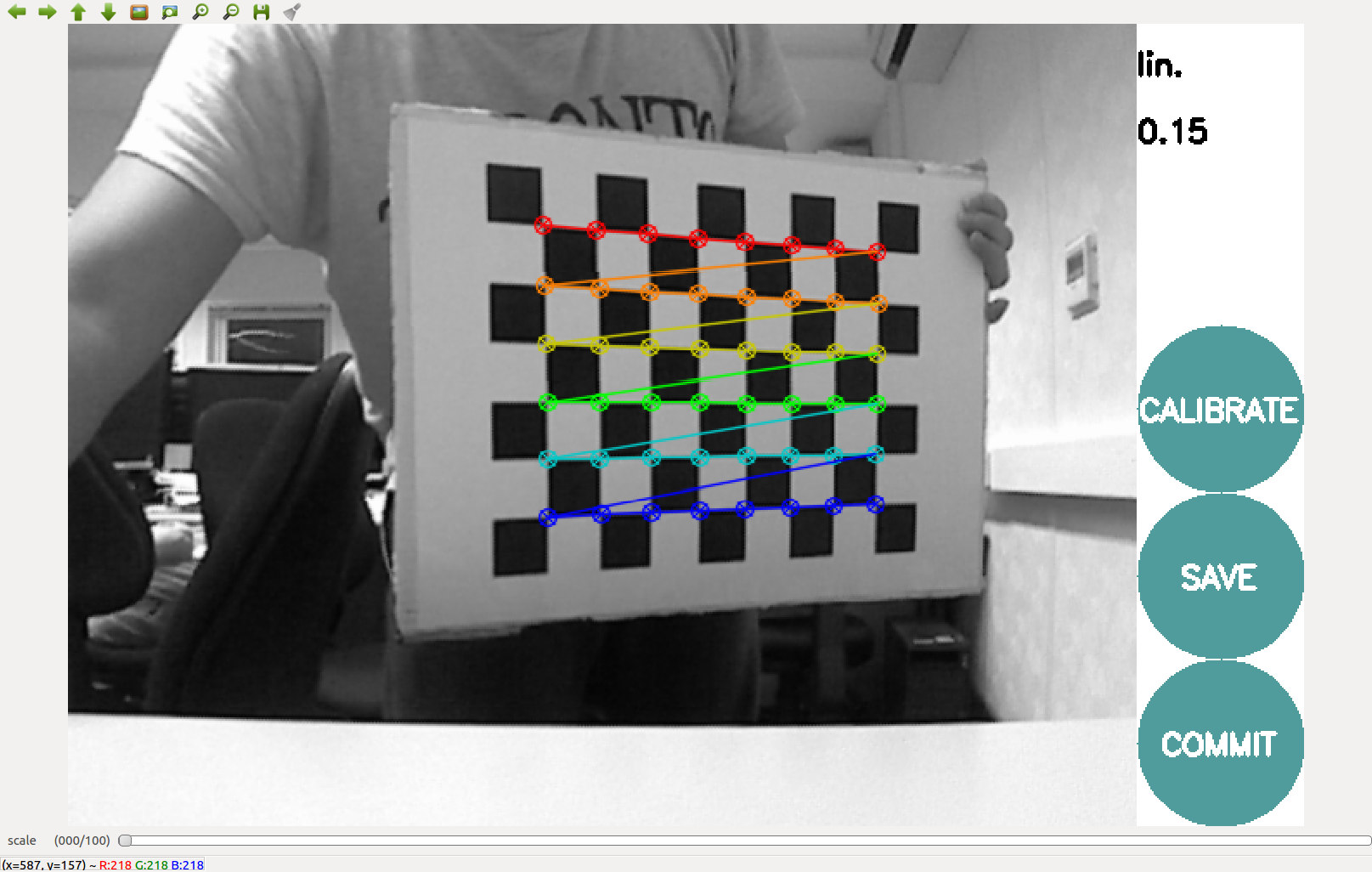
click save and commit.
('D = ', [0.25635013336442597, -0.2984876596963141, 0.0009734146169052192, -0.03244694037216558, 0.0])
('K = ', [553.5744369056831, 0.0, 302.6957080579083, 0.0, 550.0423080886541, 265.22392609849635, 0.0, 0.0, 1.0])
('R = ', [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0])
('P = ', [580.197998046875, 0.0, 284.542819663453, 0.0, 0.0, 597.4571533203125, 265.5130111590879, 0.0, 0.0, 0.0, 1.0, 0.0])
None
# oST version 5.0 parameters
[image]
width
640
height
480
[narrow_stereo]
camera matrix
553.574437 0.000000 302.695708
0.000000 550.042308 265.223926
0.000000 0.000000 1.000000
distortion
0.256350 -0.298488 0.000973 -0.032447 0.000000
rectification
1.000000 0.000000 0.000000
0.000000 1.000000 0.000000
0.000000 0.000000 1.000000
projection
580.197998 0.000000 284.542820 0.000000
0.000000 597.457153 265.513011 0.000000
0.000000 0.000000 1.000000 0.000000
('Wrote calibration data to', '/tmp/calibrationdata.tar.gz')
same process for depth
rosrun camera_calibration cameracalibrator.py image:=/camera/ir/image_raw camera:=/camera/ir --size 8x6 --square 0.108
('D = ', [0.07461283337631101, -0.05140216584982599, -0.01283327736638255, -0.022223551078988033, 0.0])
('K = ', [616.9181589642653, 0.0, 282.06293869836986, 0.0, 618.6876986838676, 231.94223956859452, 0.0, 0.0, 1.0])
('R = ', [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0])
('P = ', [629.367919921875, 0.0, 270.8282119673022, 0.0, 0.0, 641.358642578125, 227.3242873304116, 0.0, 0.0, 0.0, 1.0, 0.0])
None
# oST version 5.0 parameters
[image]
width
640
height
480
[narrow_stereo]
camera matrix
616.918159 0.000000 282.062939
0.000000 618.687699 231.942240
0.000000 0.000000 1.000000
distortion
0.074613 -0.051402 -0.012833 -0.022224 0.000000
rectification
1.000000 0.000000 0.000000
0.000000 1.000000 0.000000
0.000000 0.000000 1.000000
projection
629.367920 0.000000 270.828212 0.000000
0.000000 641.358643 227.324287 0.000000
0.000000 0.000000 1.000000 0.000000
('Wrote calibration data to', '/tmp/calibrationdata.tar.gz')
reference:
http://wiki.ros.org/camera_calibration/Tutorials/MonocularCalibration
http://wiki.ros.org/openni_launch/Tutorials/IntrinsicCalibration

















 5085
5085

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









