









 本文介绍了一种针对工业控制领域的创新解决方案——MIESoC模块,它实现了MechatrolinkIII与EtherCAT协议间的高效转换,无需增加主系统硬件,显著降低开发成本和CPU负担。通过Intel Cyclone V SoC和ARM Cortex A9双核处理器,MIESoC提供了集成的FPGA和I/O资源,简化了系统扩展与集成过程。
本文介绍了一种针对工业控制领域的创新解决方案——MIESoC模块,它实现了MechatrolinkIII与EtherCAT协议间的高效转换,无需增加主系统硬件,显著降低开发成本和CPU负担。通过Intel Cyclone V SoC和ARM Cortex A9双核处理器,MIESoC提供了集成的FPGA和I/O资源,简化了系统扩展与集成过程。
概述
工业以太网在工业控制领域越来越流行,协议种类较多,例如Mechatrolink III、EtherCAT、Powerlink、Profinet、EtherNet/IP等等,在数控加工领域主流的协议有Mechatrolink III、EtherCAT。但是各种协议之间很难通信协作。
安川电机的Mechatrolink III是一项先进的工业以太网技术,在数控加工领域应用广泛。伺服设备多采用Mechatrolink III,但缺少配套的I/O或传感设备,国内的I/O或传感设备多采用EtherCAT,资源相对丰富。Mechatrolink III转 EtherCAT Master 的MIE SoC模块,有效解决了Mechatrolink III协议缺少配套设备的问题,能够快速接入,减轻系统负担,同时支持多个I/O设备接入。
Mechatrolink III 转 EtherCAT 解决方案
现有解决方案一般如下图所示,
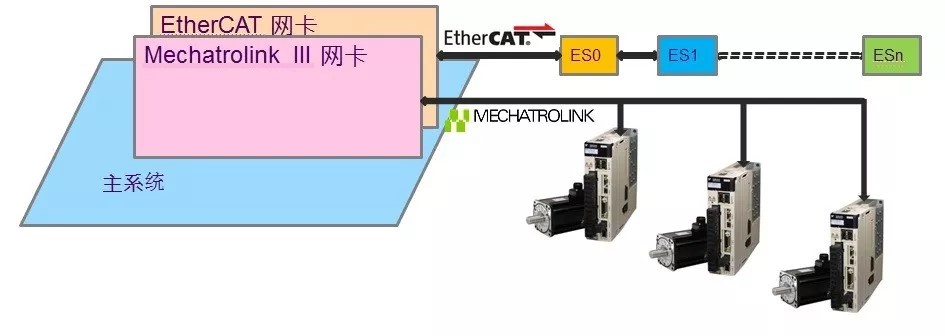
主系统中要同时支持两种协议,系统成本增加。同时,开发难度大,需要更多的软硬件开发投入,而且CPU负担重,导致升级系统成本增加。
采用MIE SoC模块的解决方案如下图所示,
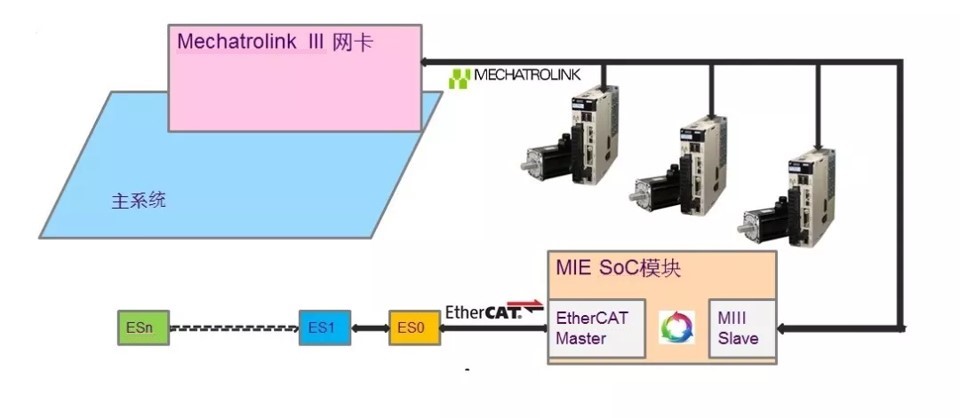
主系统硬件不做任何改变,无需硬件开发投入,CPU不增加负担。仅需增加MIE SoC模块即可快速实现EtherCAT设备扩展。
MIE SoC模块简介
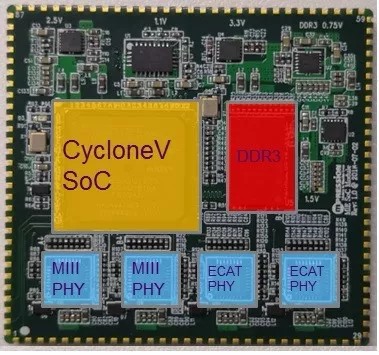
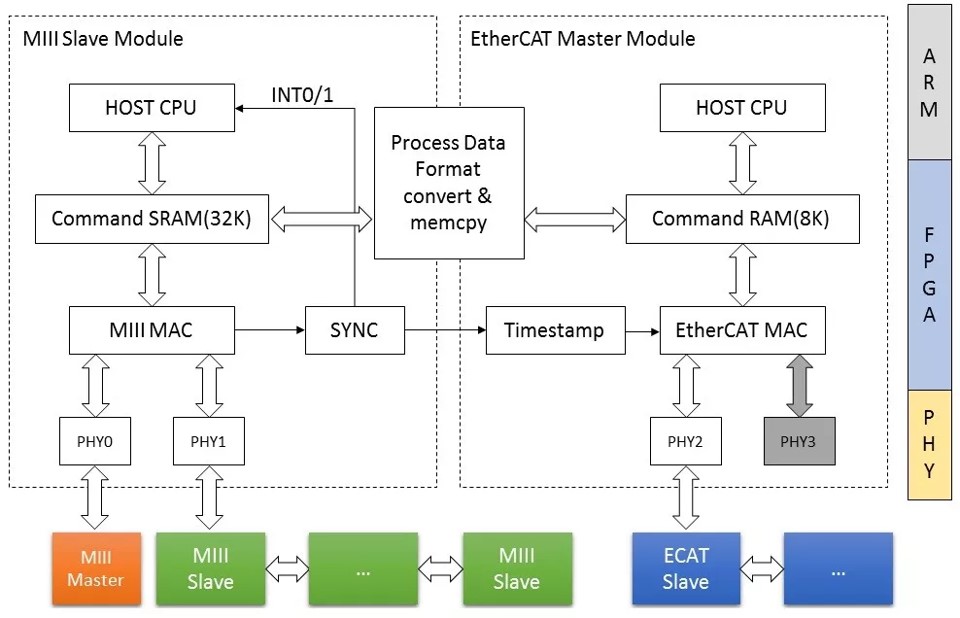
MIE SoC模块实物和结构框图如下图所示,基于Intel Cyclone V SoC模块, 最小片上系统,上电自启动。FPGA部分集成Mechatrolink III和EtherCAT两个IP,以及Mechatrolink III和EtherCAT之间报文转换和同步处理。不仅可以实现Mechatrolink III Slave转EtherCAT master,还可以实现Mechatrolink III master + EtherCAT master的双主站系统。FPGA 片上ARM A9处理器完成Mechatrolink III和EtherCAT初始化,周期性中断处理及异常处理等。
技术参数
- Intel Cyclone V SoC主处理芯片
- 集成ARM-Cortex A9 双核处理器
- 集成FPGA
- 模块外设
- QSPI Flash (16MB)
- DDR3 *16bit (512MB)
- 集成4路 100M PHY
- 其中两路实现Mechatrolink Slave
- 另外两路实现 EtherCAT Master
- PCB
- 12层, 54mm*54mm
- 邮票孔设计
结束语
MIE SoC模块是低成本的工业以太网协议转换模块,FPGA实现协议的硬转换,效率高,实时性强,系统组建简单易用,而且能够降低系统复杂度。

















 922
922

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









