




角色由于胶囊体的阻挡,双脚与地面平行,不会与斜坡、台阶等贴合,有一条腿会处于悬空状态,通过双骨骼IK节点使一只脚太高,让后胶囊体下降,修正双脚的角度。这就是逆向运动IK的方法。

一、新建第三人称模板游戏,打开小白人动画蓝图的动画图表进行以下操作:
右键搜索two bone ik。

双骨骼IK(Two Bone IK)将把逆向运动学解算器应用到一个3关节链上(例如角色的四肢)。

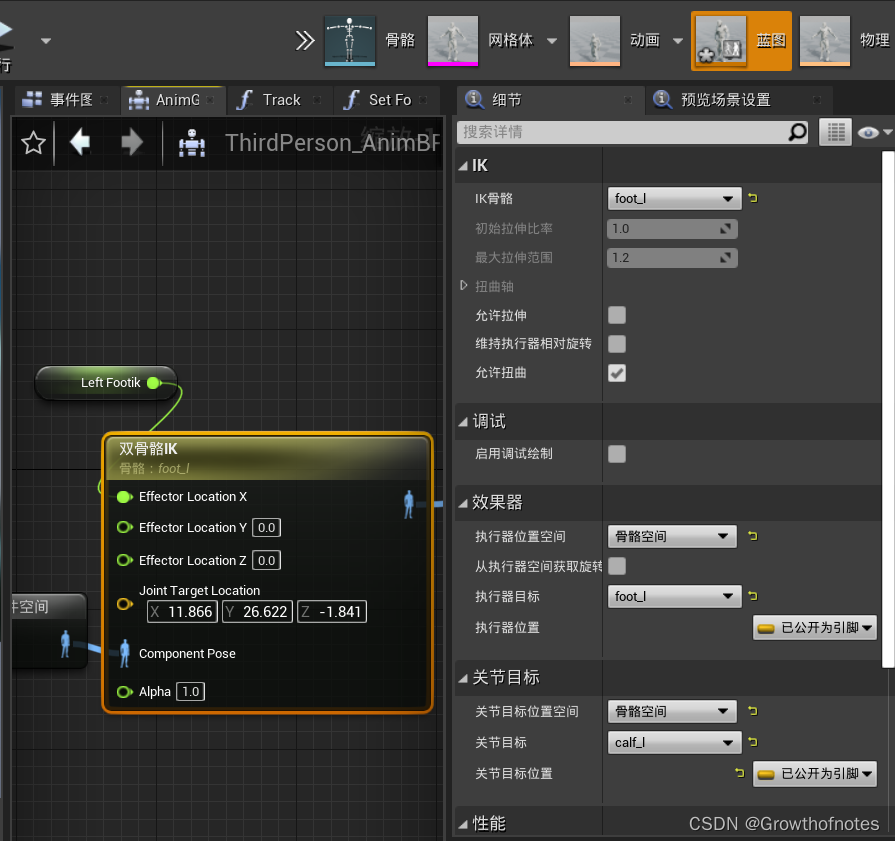
左脚的IK骨骼应该为foot_l,细节面板设置为下图:

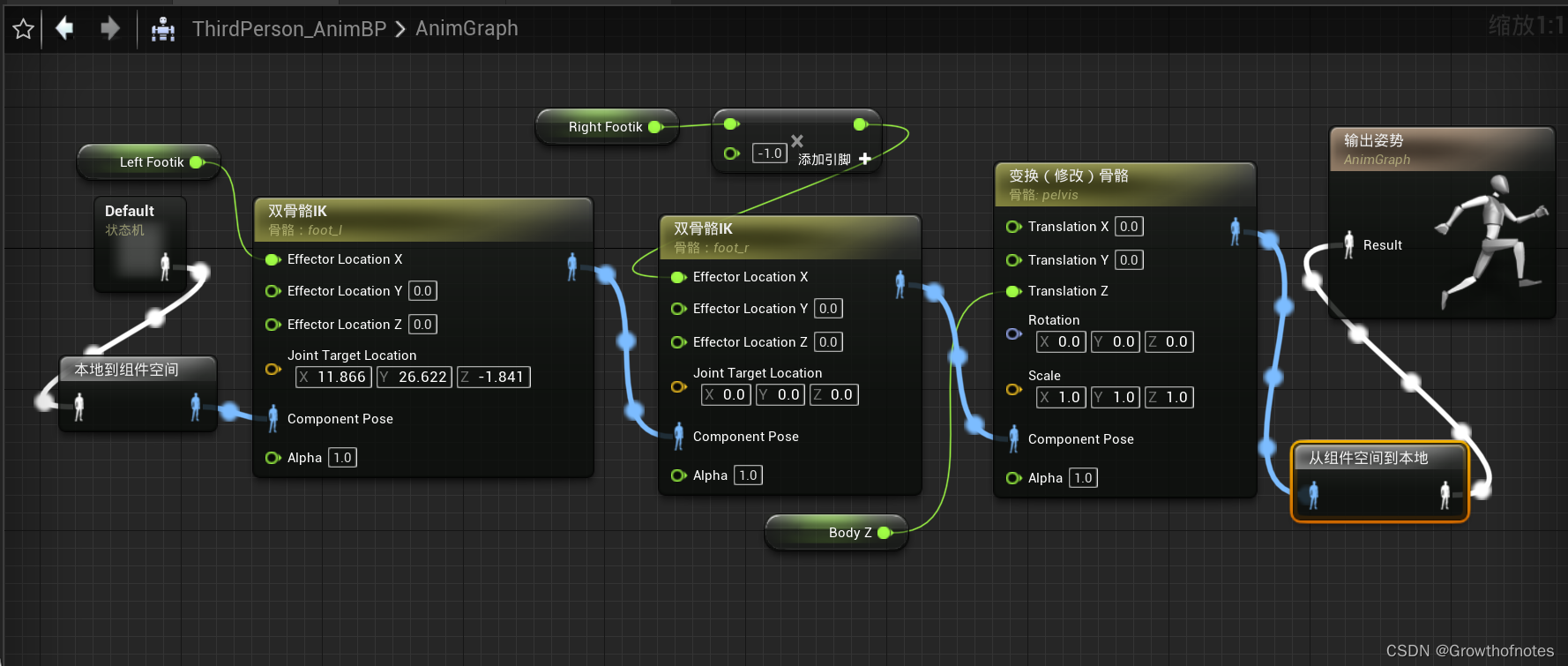
另一个右脚也照此设置,连接节点,效果图如下:
通过视图中小白人脚部拖动,观察双骨骼IK节点数据的变化,理解此节点的作用。把参数提升为变量用于控制,但是为了怕出错不用组件空间,而是用骨骼空间,为了便于理解我们用组件空间来观察参数效果。
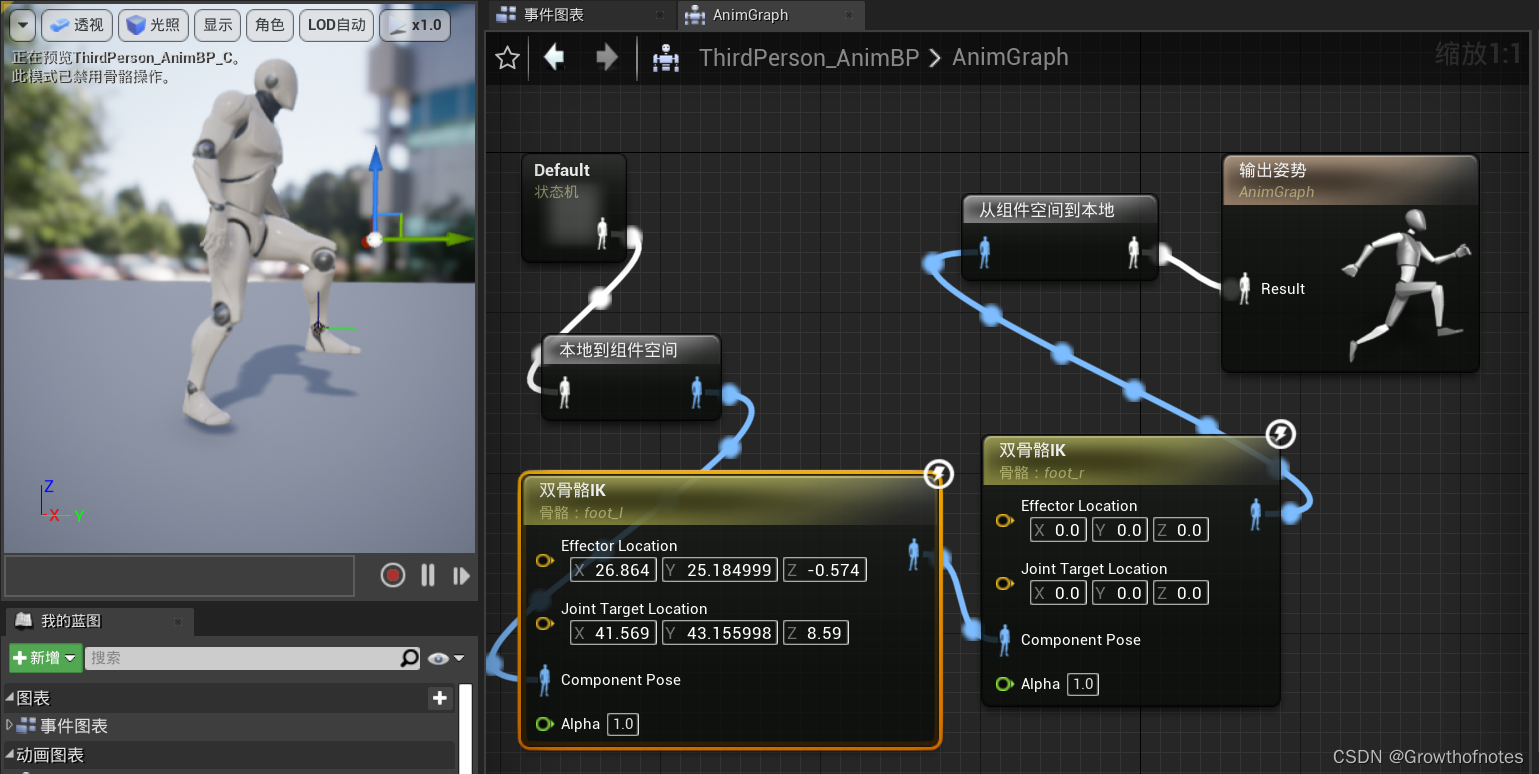
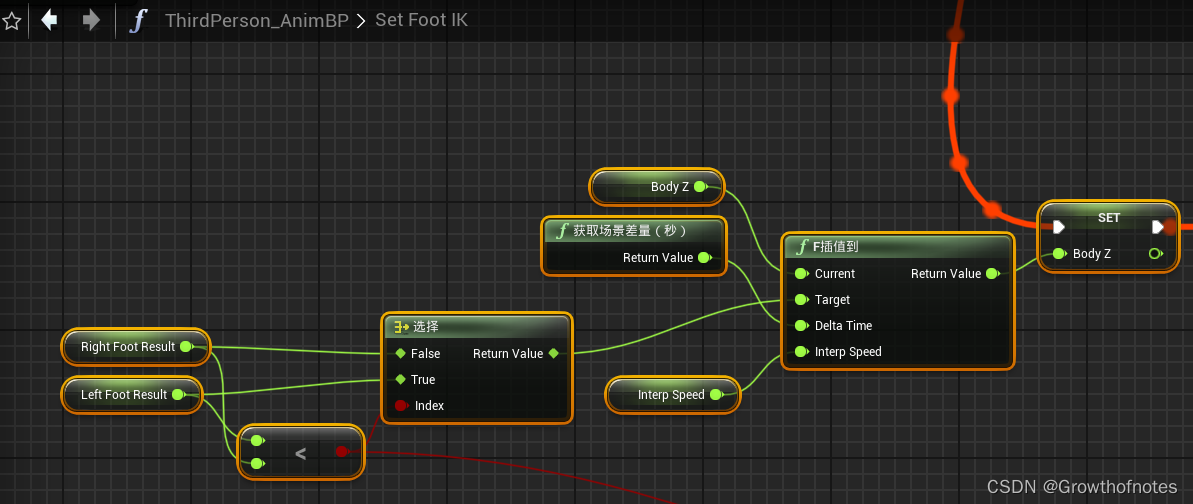
在人物状态机的后面加入姿势调整双骨骼ik,并改变mesh网格体的位置及盆骨的Z方向的值,连接总图如下:
注意:双骨骼ik采用的是骨骼空间,如下图:
Effector location的x分量改变的是脚的抬起和落下,大于0抬起,小于0落下。数值为50时抬起,如下图:

数值为0时,与站立时姿势一致,如下图:

二、进入动画蓝图的事件图表部分:
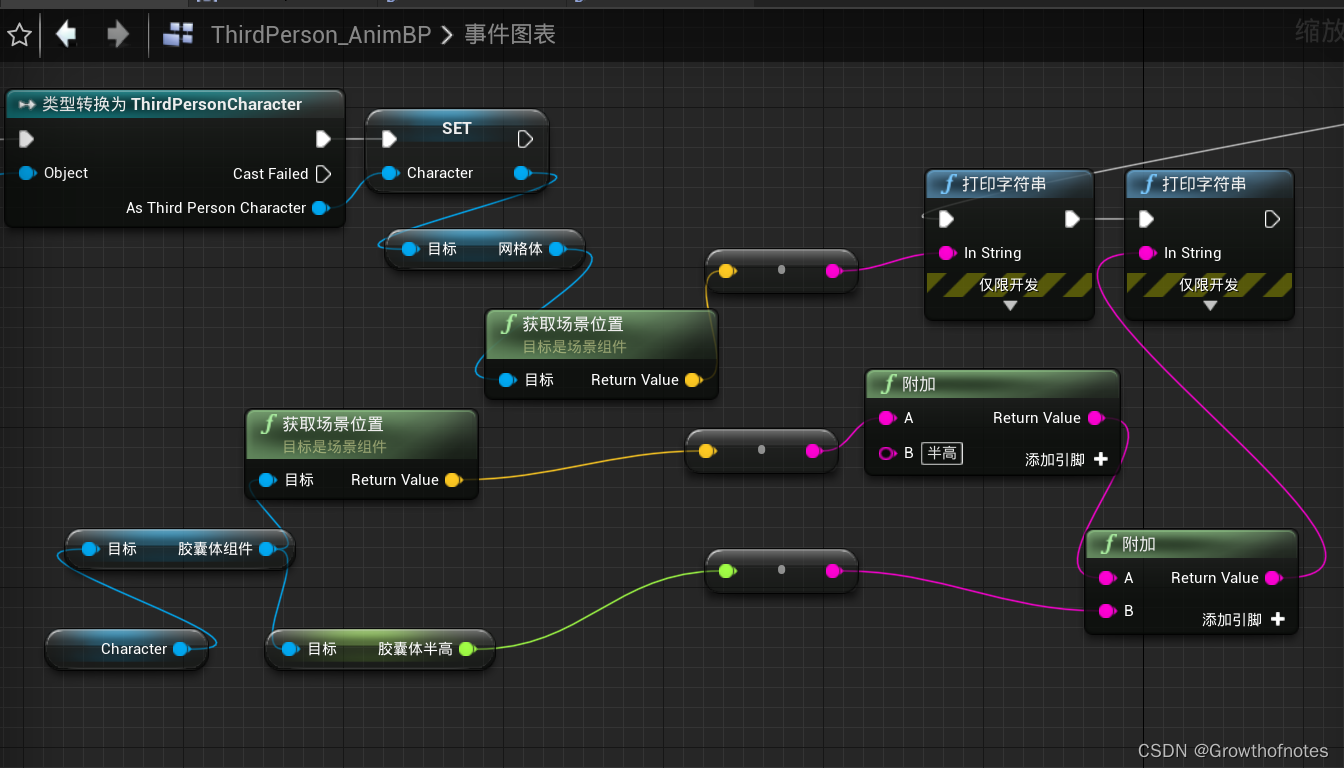
1、完成蓝图初始化动画重载,保存小白人角色变量Character,方便使用,如图:

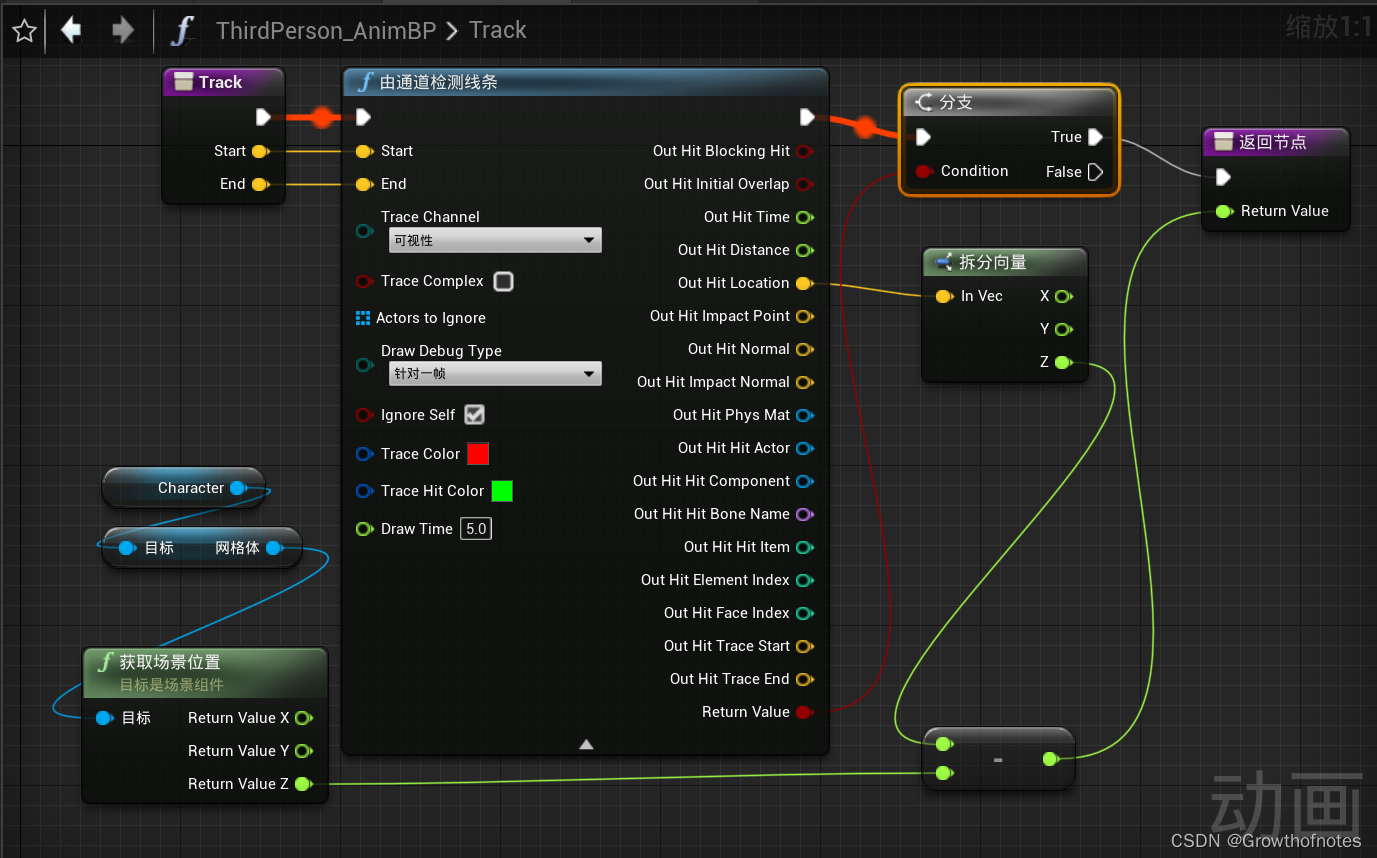
2、制作射线监测函数Track:如下图:
蓝图更新动画时输出下骨架网格体mesh的场景位置看看是什么?明白Track函数返回的是什么?如下图:

骨架网格体的场景位置是根骨骼的场景位置,处于两脚中间位置,每一个脚探测出的距离都是脚的脚踝离地面的距离。注意得数是负数,越小说明越远。
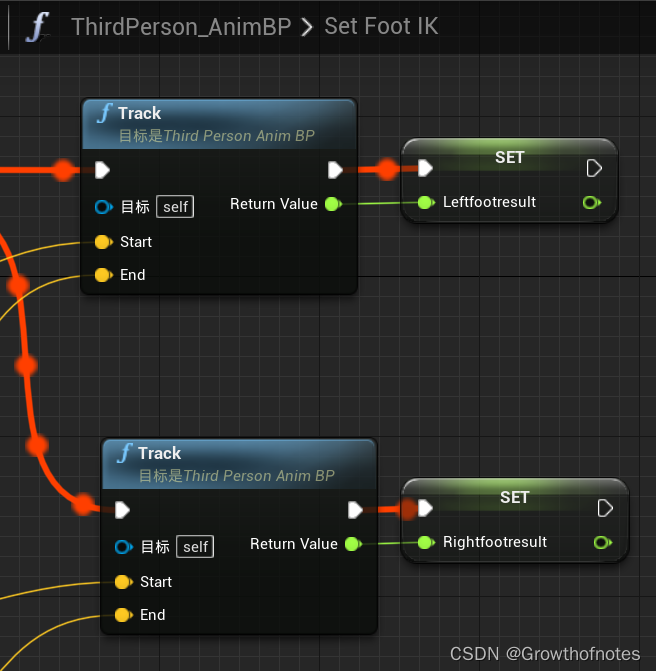
3、创建函数SetFootIK,先要对左右脚的Track函数的射线监测的Start和End进行设置。得到的Track函数的返回值分别设置为变量Leftfootresult和Rightfootresult。
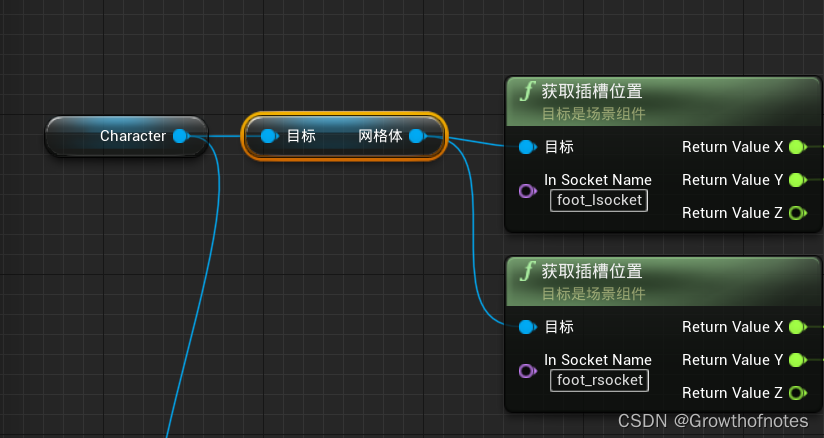
射线监测的X和Y轴向数据来自于脚上foot_l和foot_r两块骨骼的插槽:
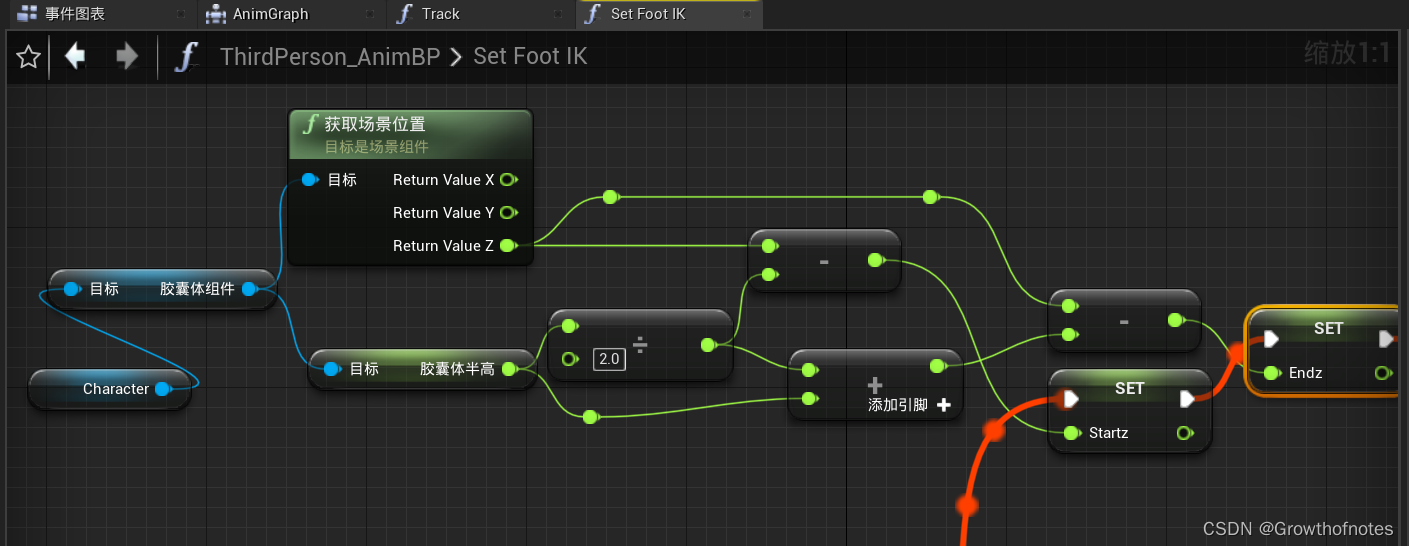
射线监测的Z轴向数据初始点Z来自于胶囊体场景位置Z数值(大约228,含地板高度)-胶囊体半高96➗2,射线监测的Z轴向数据结束点为胶囊体场景位置Z数值(大约228含地板高度)-(胶囊体半高96➗2+胶囊体半高,实际相当于胶囊体3/4的距离,也就是说脚不能抬得太高了),实际上因为x和y确定了,z只要是自上而下的射线检测就可以。
为了理解这里,可以用以下节点进行数据输出,也可以看细节面板来观察数值,下图:
测试运行结果如图:

得到的Track函数的返回值分别提升为变量Leftfootresult和Rightfootresult。这样我们就可以得出小白人骨架网格体(左右脚位置处)离地面的距离Z轴向距离。
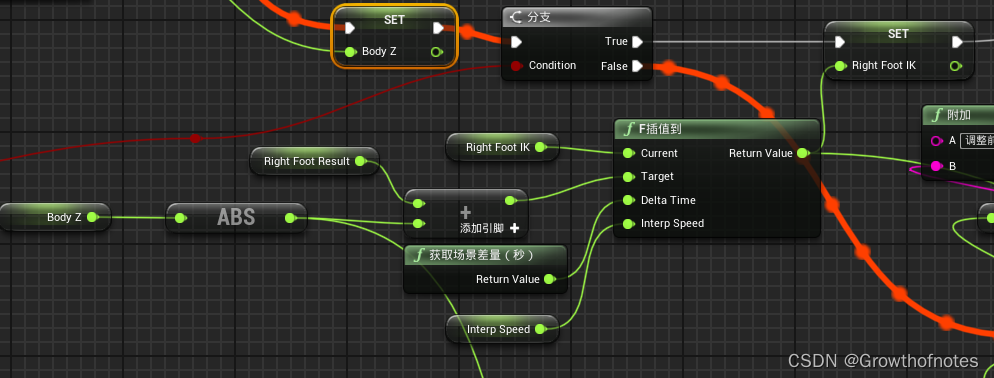
下面先让骨架网格体落下悬空距离大的距离:
由于多落下了一点距离,就是脚踝到脚底的距离,所以说我们需要对两脚都要太高:
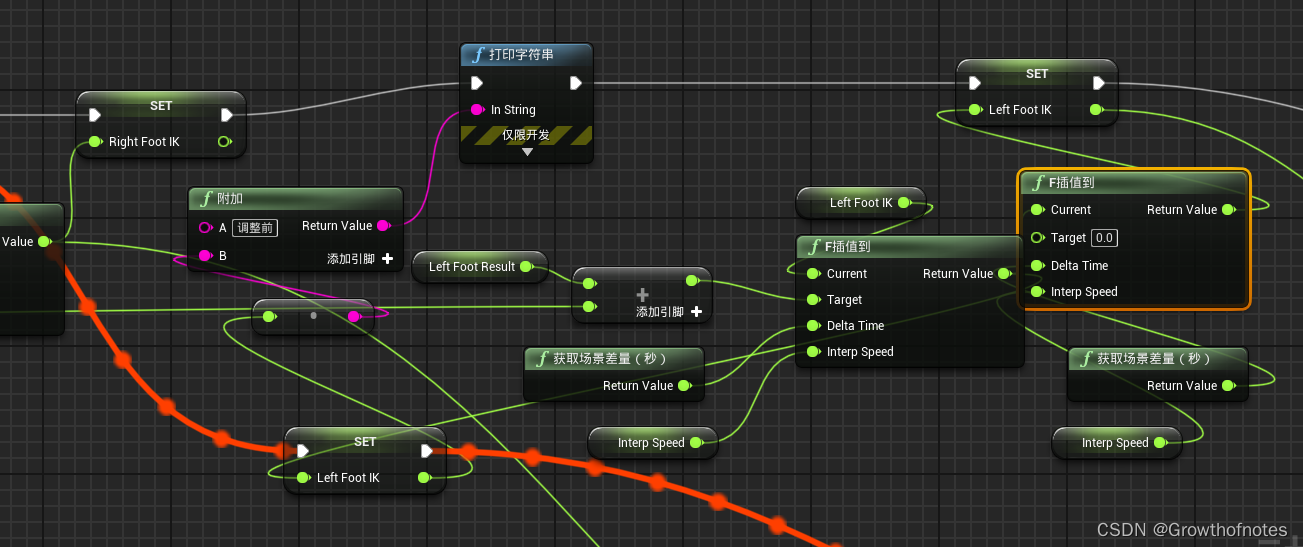
另一个脚同样操作:
事件蓝图运行就可以了!
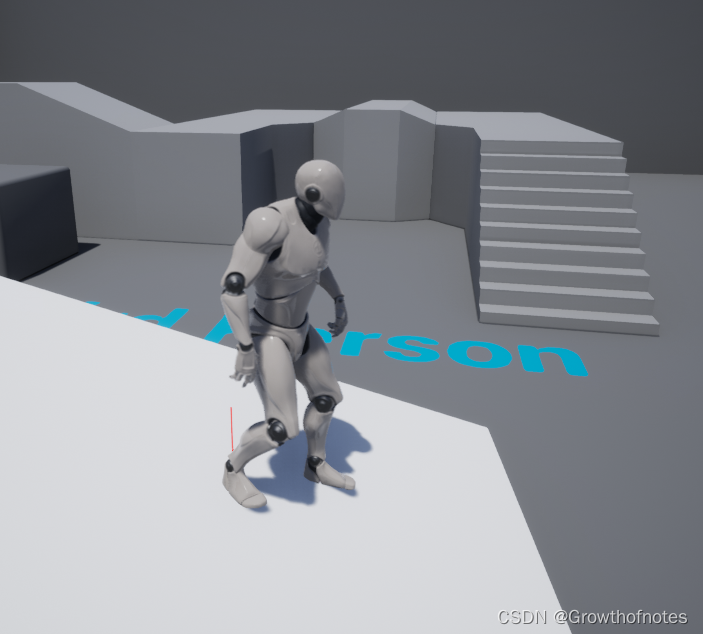
运行效果如下图:


















 1492
1492

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











