




研究背景
在工业制造、危险环境作业等领域,机器人远程操作技术是突破人类作业边界的关键手段。传统远程操作依赖2D 相机反馈与操纵杆控制,存在空间感知差、操作精度低、沉浸感弱等问题,难以满足复杂移动操作任务需求。
例如在核设施退役、灾后救援等场景中,操作员无法精准判断机器人与障碍物的相对位置,易导致操作失误。
针对这一痛点,研究人员以Franka Research 3机器人为核心实验载体,提出 “高斯溅射 + VR” 融合的双阶段远程操作框架。该框架通过高斯溅射技术构建高保真3D 环境模型,结合VR设备实现沉浸式交互,同时设计 “导航 - 操作” 双阶段工作流程,解决传统系统在遮挡处理、空间连贯性、操作直观性上的缺陷。
最终通过实验验证,该框架能使66%的操作者完成任务时间平均缩短43%,93%的操作者更偏好该操作模式,显著提升远程操作的效率与可靠性。
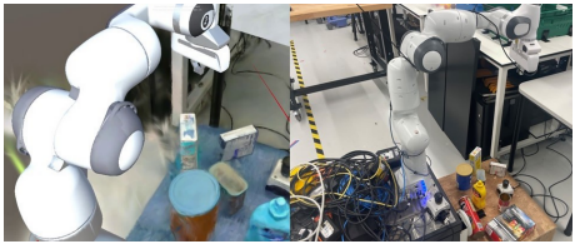
图 1:本图展示了我们所提出框架的一个应用示例。左侧为通过高斯溅射(Gaussian splattering)技术重建的机器人及场景的虚拟现实呈现;右侧为安装在移动基座上的实体机器人在实际环境中执行操作阶段的状态。
研究核心亮点
高斯溅射3D 环境重建:通过 “多视角图像采集→SfM 算法特征计算与姿态估计→神经渲染训练高斯模型” 流程,生成含位置、颜色、透明度参数的高保真 3D 场景,有效处理遮挡问题,支持 VR 环境内自由调整视角,提升空间感知能力。
图 2
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 470
470

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









