



研究背景
在机器人学习领域,模仿学习依赖人类遥操作演示数据来训练机器人技能,但现有遥操作系统存在两大痛点:一是传统高保真系统(如触觉设备、机器人对机器人遥操作)成本高达数万美元,难以普及;二是低成本设备(如3D鼠标、VR控制器)因忽略机器人运动学约束,操作直观性差,导致演示数据质量低、失败率高。
为解决这一矛盾,加州大学伯克利分校团队提出GELLO通用框架,旨在构建低成本且直观的机器人操作远程操作系统,研究团队使用Franka、UR5等机械臂进行系统的设计与搭建。,通过“低成本 + 运动学等效” 设计,实现了单设备成本低于 300 美元的遥操作系统。该框架不仅降低了数据收集门槛,还能高效获取高质量、多样化的演示数据,显著提升机器人模仿学习的性能上限。
研究中的核心方法
GELLO框架的核心方法围绕 “低成本、直观性、易复制” 展开,具体包括:
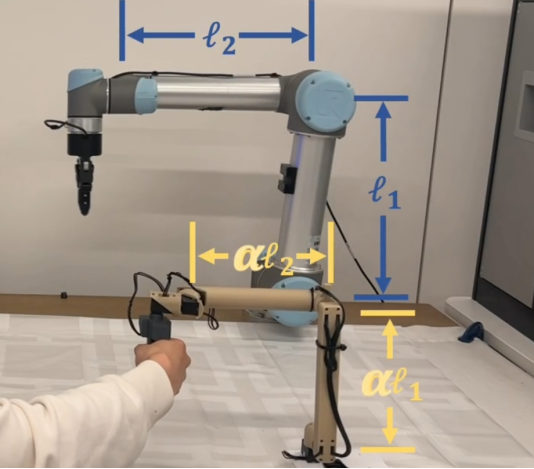
运动学等效设计:为目标机械臂构建微型化、运动学结构完全一致的控制器。通过获取目标臂的DH 参数并按0.5比例缩放(α=0.5),使GELLO的关节和连杆与目标臂一一对应,用户可直接通过控制 GELLO感知目标臂的运动学约束(如奇点、关节极限),无需计算逆运动学。
低成本硬件实现:采用3D打印部件制作结构件,搭配DYNAMIXEL XL330系列伺服电机(含12位高分辨率编码器,测量精度达0.088机械度)作为关节驱动与传感组件,利用其物理阻力实现自然阻尼,提升操作稳定性。
关节正则化机制:通过弹簧或橡皮筋等简单机械组件,抵消重力对控制器的影响,防止关节下垂导致的碰撞风险,同时提供被动反馈帮助用户感知关节状态。
实验设置
测试机械臂:选用3种主流型号 ——UR5、Franka、xArm7,均为机器人学习领域常用平台,覆盖不同自由度和结构特点。
GELLO控制器:为上述3种机械臂分别定制,采用3D打印部件、DYNAMIXEL XL330-288T伺服电机(高齿轮比,提供更大操作阻力)
对比设备:选取两类低成本遥操作设备作为基准——3鼠标(SpaceNavigator)、VR控制器(Meta Quest 2)。
通信与控制:通过DYNAMIXEL提供的Python API读取GELLO关节角度,利用 ZMQ协议进行进程间消息传递,调用各机械臂的Python API发送控制指令。
实验设计与验证
GELLO 控制器仅依赖被动伺服电机时,受重力影响易出现关节下垂(如肘关节下坠),导致设备姿态不稳定,甚至与环境发生碰撞。为此,研究团队引入关节正则化设计(采用弹簧或橡皮筋等简单机械组件),并通过实验量化其对操作力的影响。
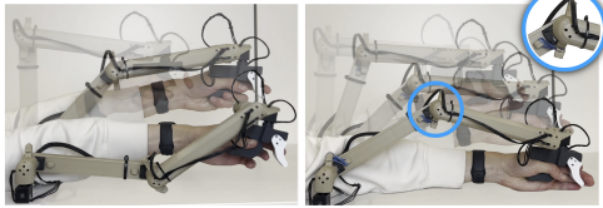
该图展示了GELLO在有和没有关节正则化情况下的轨迹。左图:没有关节正则化时,肘关节会下垂。这会导致后续任务的关节配置不利,甚至与桌子发生碰撞。右图:有关节正则化时,肘关节的运动最小,从而形成更有利的关节配置。
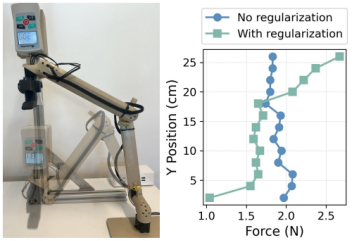
对在不同高度下,实施简单关节正则化对维持遥操作设备静止所需力的影响的定量分析。在没有关节正则化的情况下,测量得到的抵抗重力所需的力在1.9N左右大致恒定。这可能会使操作员更难感受到机器人的运动学极限。有了正则化,我们可以看到,在靠近桌面时,恢复力有助于减少补偿重力所需的力,而在远离桌面时,则提供更高的恢复力,促使用户避免奇异点。
实验通过研究和多任务测试验证GELLO性能,具体如下:
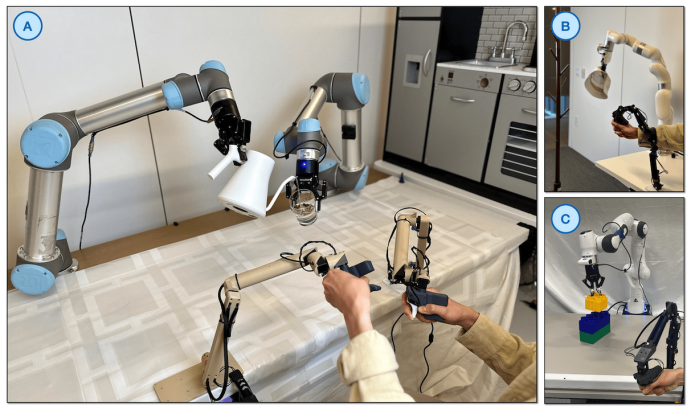
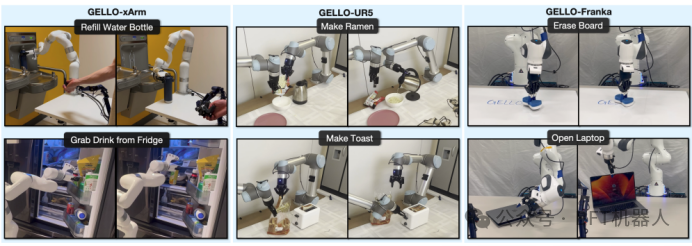
为3 种不同的机械臂设计GELLO。在这三种机械臂上用GELLO进行了一系列任务实验,以定性观察遥操作效果。
低成本机器人遥操作方案
对比实验:
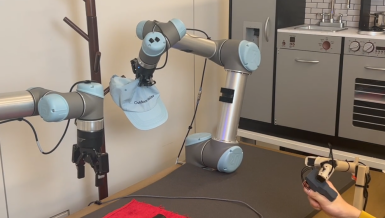
使用两台UR5机器人进行的双手机器人远程操作,以评估GELLO与其他常用远程操作设备在受控条件下的比较效果。
将GELLO与VR控制器和3D鼠标进行比较,如下所示。每位用户尝试使用所有 3 个远程操作设备完成5项任务。
-
单臂操作:将帽子放在架子上;
-
双臂协作:香蕉交接(大工作空间移动);
-
精细操作:打开盒子取面罩、USB 插入;
-
变形物体处理:折叠毛巾。
结果:
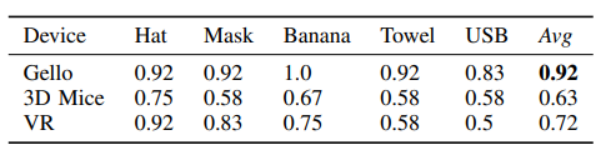
表1:不同遥操作系统的任务成功率。GELLO在各方面均取得最高成功率。
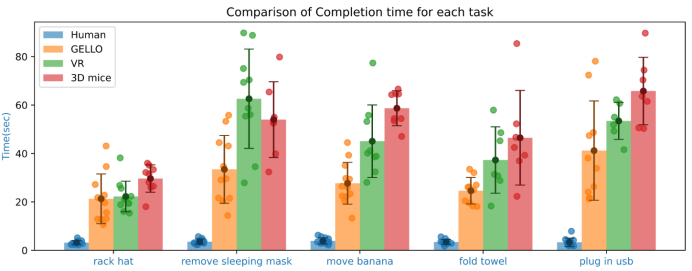
使用GELLO 可以持续缩短完成时间。这不仅意味着 GELLO 更易于使用且成功率更高,也体现了其高效性;更快的完成时间能够帮助用户在给定的时间内完成更多成功的操作。
关键成果与突破
-
性能领先:GELLO在所有任务中成功率最高,显著优于其他设备。
-
低成本优势:仅为传统机器人对机器人遥操作的1%,且与 VR 控制器同价但性能更优。
-
操作直观性:因运动学等效设计,GELLO 的自碰撞和超时失败率最低
-
开源性:硬件设计、软件代码、物料清单完全开源(https://wuphilipp.github.io/gello/),便于研究者复现和拓展。
结语
GELLO框架通过 “低成本 + 运动学等效” 设计,突破了传统遥操作系统的价格与性能瓶颈,为机器人学习领域提供了一种高效收集高质量演示数据的方案。其开源特性进一步降低了研究门槛,有望推动模仿学习在更多复杂操纵任务(如双臂协作、接触密集型操作)中的应用,加速机器人技能学习的工业化进程。

















 1261
1261

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









