



论文背景:破解机器人策略训练的“三重矛盾”
在机器人操作策略训练领域,仿真、人类视频、真实遥操作这三大核心数据来源始终存在难以调和的矛盾:仿真虽能提供与机器人对齐的动作空间,却因“仿真 - 现实差距” 导致策略迁移效果差;人类视频具备真实场景与物理规律,却缺乏同步的机器人动作数据;真实遥操作虽能实现感知与动作的精准匹配,却受限于高昂成本与扩展难度。
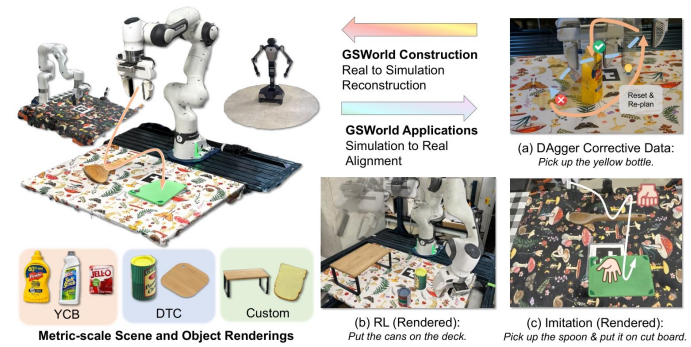
加州大学团队联合 Meta 提出GSWorld 仿真套件,以 Franka Research 3(FR3)机械臂为核心实验载体,通过 “3D 高斯泼溅技术(3DGS)+ 物理引擎” 的融合方案,构建闭环仿真体系,最终实现零样本仿真 - 现实策略迁移、高效策略迭代与可复现基准测试,为机器人操作策略开发提供全新范式。
验证方法与框架:闭环仿真的“双向流水线”
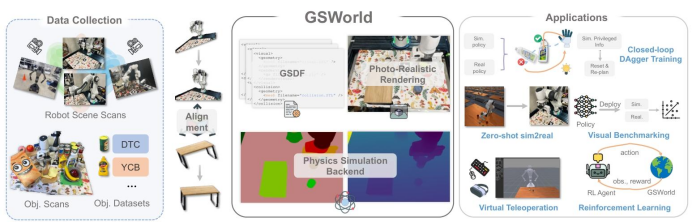
GSWorld 的核心优势在于构建 “现实 - 仿真” 双向对齐的闭环框架,整体流程分为 “现实到仿真的场景重建”与 “仿真到现实的策略迁移”两大模块,具体逻辑如下:
1. 现实→仿真:高精度数字孪生构建
通过四步流程将真实场景(含 FR3 机械臂、操作物体、环境)转化为可复用的 GSDF 资产:
多视角数据采集:同步使用 FR3 的腕部相机、第三人称固定相机与手机相机,采集场景图像并记录机械臂关节姿态;
尺度校准与几何对齐:通过桌面打印的 ArUco 标记解决传统 COLMAP 方法的 “尺度模糊” 问题,结合 ICP(迭代最近点)算法将 FR3 的 URDF 模型与 3DGS 重建的真实机械臂几何对齐;
物体资产整合:整合 YCB(通用物体数据集)、DTC(高真实感物体数据集),并支持自定义物体的 3DGS 重建(如香蕉、罐头),通过称重法标注物体质量,补绘未观测区域;
GSDF 资产生成:将对齐后的机器人模型、物体模型、碰撞网格与材质属性封装为 GSDF 格式,确保物理引擎(如 ManiSkill 后端)可调用并实现真实的力学交互。
2. 仿真→现实:闭环策略迭代
基于数字孪生场景,实现策略的“训练 - 评估 - 优化” 闭环:
策略训练:在 GSWorld 中生成照片级渲染图像,用于模仿学习(IL)、强化学习(RL)训练,策略输入为 “3DGS 渲染图像 + 机械臂关节位置”,输出为目标关节动作;
故障复现与修正:部署到 FR3 的策略若出现故障,可在 GSWorld 中复现故障场景,通过 “状态重置 - 运动规划” 生成 DAgger 修正数据,迭代优化策略;
零样本迁移:因 GSDF 资产与真实场景的几何、视觉、动作空间高度对齐,仿真训练的策略无需修改即可部署到 FR3,实现 “仿真训练、真实可用”。
实验配置
1. 机械臂平台(FR3 为核心)
-
FR3:UMI 夹具,6 自由度,定位精度 ±0.1mm,承担 4 项核心任务;
-
xArm6:平行夹具,验证跨机械臂迁移能力;

2. 感知设备
-
FR3/xArm6:腕部相机 + 第三人称相机(前置 / 侧置);
-
校准工具:ArUco 标记(3DGS 尺度校准)、RealSense D435i(真实场景观测对比)。
3. 软件栈
-
仿真后端:ManiSkill 物理引擎(支持并行环境);
-
渲染核心:3DGS(照片级 RGB / 深度渲染);
-
策略算法:ACT、Pi0(验证策略无关性);
-
数据工具:MPlib 运动规划器、HTC Vive VR 遥操作。
实验设计与验证(问题与挑战)
问题1:能否实现零样本仿真 - 现实策略迁移?
挑战:传统仿真器训练的策略,因视觉、力学差异,部署到FR3 时成功率骤降;
验证方案:仅使用GSWorld 生成的仿真数据(100 条轨迹 / 任务)训练 IL 策略,直接部署到 FR3 进行测试,对比 “仿真成功率” 与 “真实成功率”;

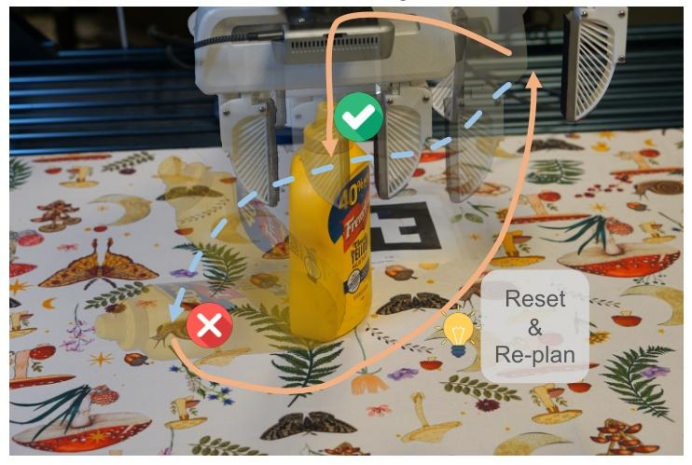
核心支撑:通过下图(FR3 闭环 DAgger 训练结果)可见,仅仿真训练的策略在 “放置盒子” 任务中,真实成功率达 50%,与仿真成功率(44%)高度接近,证明零样本迁移有效性。
问题 2:闭环 DAgger 能否加速策略迭代?
挑战:真实场景下复现 FR3 的故障场景成本高,难以收集修正数据;
验证方案:在 GSWorld 中复现 FR3 的故障轨迹,随机采样 “可恢复状态”,通过运动规划生成 DAgger 修正数据,迭代训练策略;
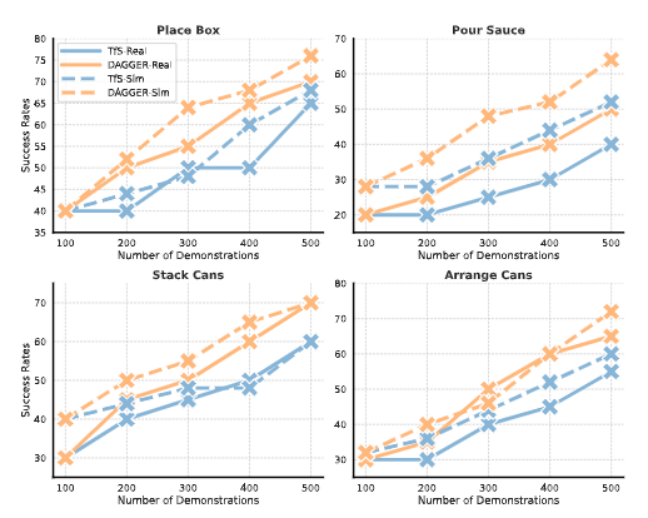
核心支撑:经过5次DAgger 迭代后,FR3 “堆叠罐头” 任务的真实成功率从30%提升至70%,远超 “从头训练” 的60%上限,证明闭环迭代的效率优势。
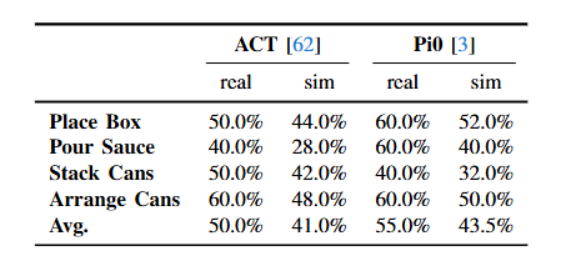
问题 3:仿真性能能否预测真实性能?
挑战:传统仿真器的“性能虚高” 问题,导致策略评估失去参考价值;
验证方案:在GSWorld中训练不同质量的策略(通过调整数据量、训练迭代次数控制),分别测试 “仿真成功率” 与 “FR3 真实成功率”,计算相关性;
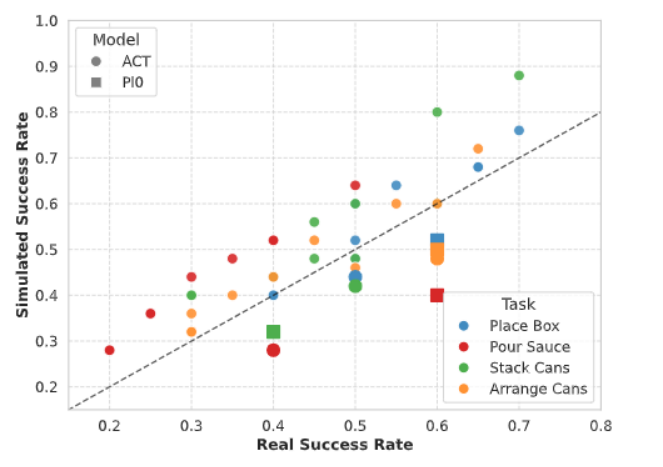
核心支撑:上图(FR3视觉基准测试结果)显示,仿真与真实成功率的相关系数达 0.9 以上,且下图表1中ACT、Pi0两种算法的 “仿真 - 真实差距” 均小于 10%,证明GSWorld可作为可靠的基准测试平台。
问题 4:能否通过虚拟遥操作高效收集数据?
挑战:真实遥操作 FR3 需专业人员操作,单次数据收集耗时超 30 分钟;
验证方案:在GSWorld 中搭建R1双臂数字孪生场景,通过键盘 - 鼠标实现虚拟遥操作,记录操作轨迹并用于策略训练;
核心支撑:虚拟遥操作的数据收集效率是真实遥操作的8倍,且训练的策略部署到 R1 真实机械臂时,任务成功率达65%,与真实遥操作数据训练的策略性能相当。
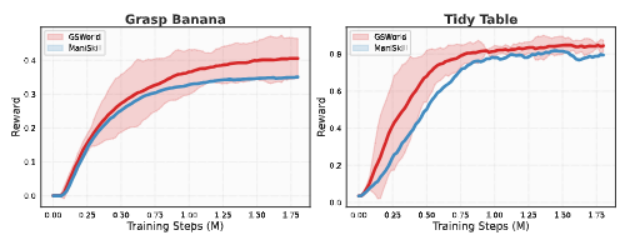
问题 5:能否缩小强化学习(RL)的仿真 - 现实差距?
挑战:RL需大规模环境交互,传统仿真器的视觉差距导致策略在真实场景中 “无法感知”;
验证方案:在GSWorld中训练非对称SAC(强化学习算法),仅使用第三人称3DGS渲染图像,对比 ManiSkill(传统仿真器)的真实成功率;
核心支撑:在“抓取香蕉” 任务中,GSWorld训练的策略真实成功率达30%,而 ManiSkill 仅为 0%,证明3DGS 渲染对RL策略迁移的关键作用(下图:RL训练结果对比)。
关键成果与突破
-
关键成果与突破:重新定义机器人仿真的“三大标准”
-
突破“仿真 - 现实对齐” 瓶颈,建立 “数字孪生可靠性标准”
-
构建 “闭环策略迭代” 体系,革新策略开发效率
-
建立 “可复现视觉基准测试”,统一行业评估标准
未来应用方向
-
工业机器人:柔性生产的“数字预演”
-
服务机器人:家庭场景的“低成本驯化”
-
机器人算法研发:通用策略的“标准化测试床”
结语
GSWorld 的提出,不仅是 “3D 高斯泼溅技术 + 物理引擎” 的技术融合,更是对机器人操作策略开发范式的重构 —— 它将传统 “仿真训练→真实试错→反复迭代” 的线性流程,升级为 “数字孪生驱动的闭环迭代”,从根本上解决了 “仿真 - 现实差距”“数据成本高”“实验难复现” 三大行业痛点。
以 FR3 机械臂的实验验证为起点,GSWorld 证明:通过高精度数字孪生,机器人策略可以在 “虚拟环境中充分优化,真实场景中直接可用”。未来,随着 GSDF 资产库的扩展(覆盖更多机械臂、物体与场景)与算法的迭代(如结合生成式 AI 自动生成场景),这一方案有望成为机器人操作领域的 “基础设施”,推动机器人从 “实验室演示” 走向 “规模化产业应用”。
项目详情:https://3dgsworld.github.io

















 970
970

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









