




研究背景
移动操作是机器人领域的核心挑战,它使机器人能够在各种任务和动态日常环境中为人类提供帮助。传统的移动操作方法由于缺乏大规模训练,往往难以在不同任务和环境中实现泛化。而现有操作基础模型虽在固定基座任务中表现出强泛化性,却无法支持移动基座运动,难以直接应用于移动操作场景。
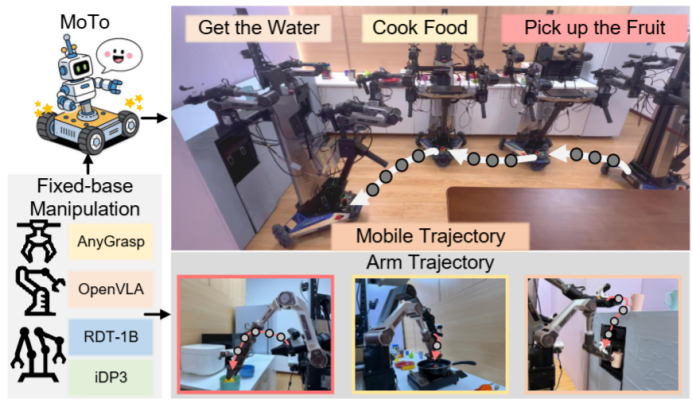
针对以上难题,清华大学等研究团队提出MoTo的零样本插件模块。该模块可与任何现成的固定基座操作模型结合,通过交互感知导航策略生成合适的基座停靠点,并利用视觉 - 语言模型(VLM)生成交互关键点,引导机器人移动至能成功执行固定基座操作的位置,最终实现零样本移动操作,且无需依赖移动操作专家数据。
这一方案解决了传统方法中导航与操作目标脱节导致的复合误差问题,同时突破了固定基座操作模型在移动场景中的应用限制。
松灵PiPER机械臂,以灵活组合赋能科研创新。单臂可精准操作,双臂能协同作业,轻松搭建专属双臂机器人实验平台。只需简单组合,即可获得满足实验需求的定制化机器人,让硬件适配不再成为科研阻碍,专注于核心技术的突破与论证。
论文核心方法论
交互感知导航策略:将移动操作任务分解为子任务,针对每个子任务确定目标对象,通过识别目标对象上的交互关键点(TK)和机械臂上的手臂关键点(AK),控制机器人移动至两关键点对齐的位置,确保机械臂能有效操作目标对象。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









