




研究背景
传统机器人操作任务中,让机器人完成各种操作任务,通常需要明确它和周围环境的互动规则,缺乏扩展性,难以通过现有求解器实时生成动作。
为了解决这些问题,研究团队提出了“关系关键点约束(ReKep)” 方法。用Franka机械臂实验验证其有效性,为机器人灵活操作提供新思路,推动技术进步。
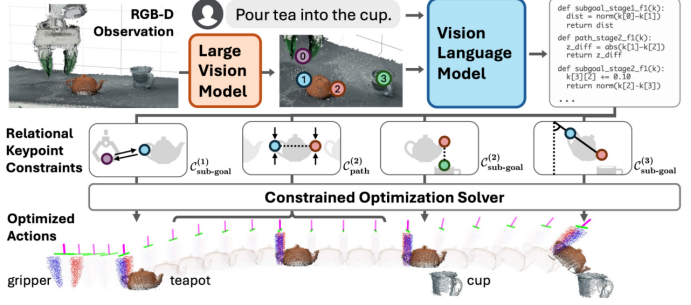
ReKep概述:先用DINOv2从摄像头拍摄的图像里,找出场景中重要的关键点(比如物体的关键部位);再把带这些关键点的图像和任务指令(比如 “倒茶”)传给GPT-4o,让它生成一系列Python程序形式的约束规则,规定不同步骤中关键点该有的位置关系;最后用优化工具根据这些规则,算出机器人末端该怎么动。整个过程不用额外训练,也不用针对具体任务准备数据。
研究中的核心方法
将操作任务表示为基于 3D 关键点的 Python 函数约束,通过大型视觉模型和视觉 - 语言模型自动生成约束,再利用分层优化程序实时求解机器人末端执行器位姿,实现多场景操作任务。
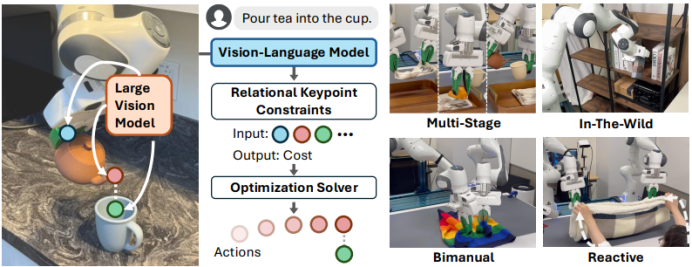
图解:把机器人要做的事,转化成一系列关于“关键点”(比如茶壶把手、杯口这些重要位置)的规则,再让模型自动生成这些规则,最后快速算出机器人的动作。这样一来,机器人不用专门学某个任务,也能在各种场景下灵活干活,比如在厨房倒茶、和人一起折毯子,甚至被打扰了也能调整动作。
实验涉及的硬件设备与环境
实验基于两种硬件平台,核心设备如下:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1416
1416

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









