




 本文围绕深度图应用展开,介绍了LinearEyeDepth和Linear01Depth函数。重点阐述通过深度图重建世界坐标系的两种方法,一是逆矩阵方式,虽能实现转换但性能差;二是屏幕射线插值方式。还说明了计算ScreenUV的方式,可用于采样深度图。
本文围绕深度图应用展开,介绍了LinearEyeDepth和Linear01Depth函数。重点阐述通过深度图重建世界坐标系的两种方法,一是逆矩阵方式,虽能实现转换但性能差;二是屏幕射线插值方式。还说明了计算ScreenUV的方式,可用于采样深度图。
此篇内容是基于深度图的应用的说明,对深度图不清楚的,请查看:
深度图的说明
- 关于相机的深度侧视图:
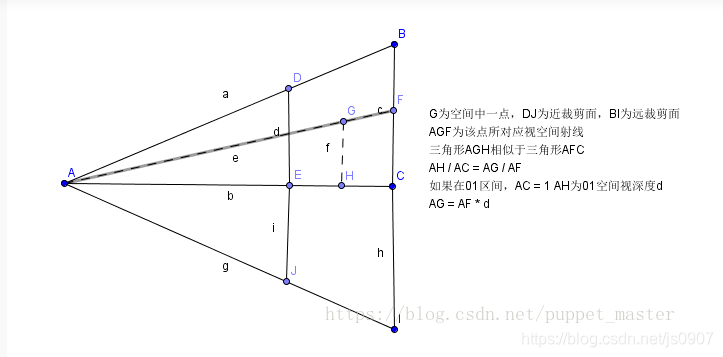 深度:存的是Z值,不是此点到相机的距离(例如 G点的深度是AH,但是AG是G点到相机的距离)
深度:存的是Z值,不是此点到相机的距离(例如 G点的深度是AH,但是AG是G点到相机的距离)
(1)第二个函数 LinearEyeDepth
此函数返回就是相机空间中的Z值
(2)第一个函数:Linear01Depth
此函数的返回值是(0,1)的线性值,也是相机空间(视角空间)中的
0:相机的位置是0
1:远裁剪平面是1
在相机空间中的Z值是深度最原始的值,将Z值/原裁剪平面far,就转换到了(0,1)的范围内
此处附上《Shader入门精要》中的推到过程:
采样深度图推导过程请点击此处查看。
下面通过深度图重建世界坐标系:
(方法一)逆矩阵方式重建
:在frag着色器中得到uv坐标(已经进行过齐次除法,且已经由【-1,1】换算到【0,1】),采样深度图得到Clip裁剪空间中的Z值
所以就得到了Clip裁剪空间中的 坐标(x,y,z).然后乘以VP矩阵的逆矩阵,就转换到世界空间中的坐标(记得/.w)
下面是逆推的演示:
条件:已知条件(M为VP矩阵,M^-1即为其逆矩阵,Clip为裁剪空间,ndc为标准设备空间,world为世界空间):
(1)
ndc = Clip.xyzw / Clip.w = Clip / Clip.w
world = M^-1 * Clip
二者结合得:
world = M ^-1 * ndc * Clip.w
(2)
我们已知M和ndc,然而还是不知道Clip.w,但是有一个特殊情况,是world的w坐标,经过变换后应该是1,即
1 = world.w = (M^-1 * ndc).w * Clip.w
进而得到Clip.w = 1 / (M^ -1 * ndc).w
带入上面等式得到:
world = (M ^ -1 * ndc) / (M ^ -1 * ndc).w
所以,世界坐标就等于ndc进行VP逆变换之后再除以自身的w。
(3)缺点
不过这种方式重建世界坐标,性能比较差,一般来说,我们都是逐顶点地进行矩阵运算,毕竟定点数一般还是比较少的,但是全屏幕逐像素进行矩阵运算,这个计算量就不是一般的大了,性能肯定是吃不消的。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3065
3065

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









