






 本文详细介绍了在Ubuntu 18.04上安装ROS Melodic的mavros步骤,包括依赖安装、mavros源码编译、环境配置和常见问题的解决方法,适用于无人机通信和信息交换。
本文详细介绍了在Ubuntu 18.04上安装ROS Melodic的mavros步骤,包括依赖安装、mavros源码编译、环境配置和常见问题的解决方法,适用于无人机通信和信息交换。
ROS系列——Ubuntu18.04下ros Melodic安装mavros步骤及问题解决-详细版
1. 说明
mavros用于无人机通信,可以将飞控与主控的信息进行交换,本文的安装方式为源码安装
2. 依赖安装
1)ros Melodic安装,参见链接Melodic安装
2)终端运行:
sudo apt-get install python-catkin-tools python-rosinstall-generator -y
运行结果如图:

3. mavros安装
1)创建mavros的工作空间并初始化,终端运行以下命令:
mkdir -p ~/my_mavros_ws/src
cd ~/my_mavros_ws
catkin init
wstool init src
成功运行该命令后,如下图


2)更新获取最新的mavlink和mavros:
在my_mavros_ws目录下获取Mavlink:
rosinstall_generator --rosdistro melodic mavlink | tee /tmp/mavros.rosinstall
成功运行该命令后,如下图

在my_mavros_ws目录下获取mavros:
rosinstall_generator --upstream mavros | tee -a /tmp/mavros.rosinstall
成功运行该命令后,如下图
3)归并链接,开始准备安装:
(1)wstool merge -t src /tmp/mavros.rosinstall
成功运行该命令后,如下图
(2)wstool update -t src -j8
步骤(2)可能出错,出错内容如下图:
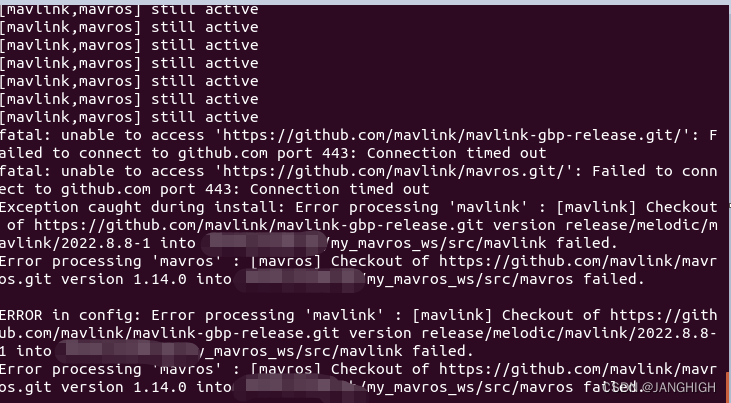
解决方法:
手动下载源码包,将其放到 my_mavros_ws/src,源码包下载链接源码包
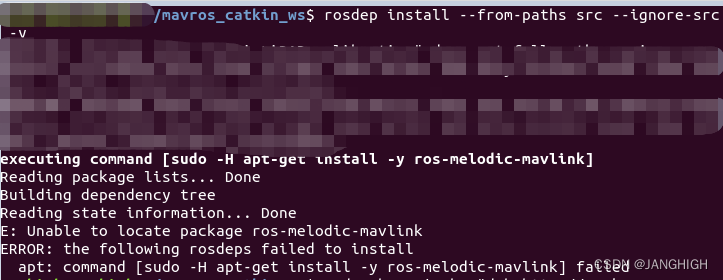
(3)rosdep install --from-paths src --ignore-src -y
如果步骤(3)出错,执行sudo apt-get update后,再执行步骤(3)命令;如果还是出错,请参看博客链接
4)安装GeographicLib数据集:
在my_mavros_ws目录下终端运行:
sudo ./src/mavros/mavros/scripts/install_geographiclib_datasets.sh

5)编译源码
在my_mavros_ws目录下终端运行:
catkin build
6)添加环境变量
sudo gedit ~/.bashrc
在.bashrc最后加上:
source ~/my_mavros_ws/devel/setup.bash
保存,退出。
4. launch运行
roslaunch mavros apm.launch
roslaunch mavros px4.launch

















 3064
3064

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









