 ROS2:服务客户端和服务器服务内省配置演示
ROS2:服务客户端和服务器服务内省配置演示




目标:为服务客户端和服务器配置服务内省。
教程级别:高级
时间:15 分钟
目录
概述
安装演示
内省配置状态
内省演示
相关内容
概述
ROS 2 应用程序通常由服务组成,以在远程节点中执行特定程序。可以通过服务内省来检查服务数据通信。
在此演示中,我们将重点介绍如何为服务客户端和服务器配置服务自省状态,并监控与 ros2 service echo 的服务通信。
安装演示
请参阅安装说明以了解安装 ROS 2 的详细信息。
如果您已经安装了 ROS 2 二进制包,请确保已安装 ros-jazzy-demo-nodes-cpp 。如果您下载了存档或从源代码构建了 ROS 2,它将已经是安装的一部分。
内省配置状态
服务自省有 3 种配置状态。
RCL_SERVICE_INTROSPECTION_OFF | 禁用 |
RCL_SERVICE_INTROSPECTION_METADATA | 仅元数据,没有任何用户数据内容 |
RCL_SERVICE_INTROSPECTION_CONTENTS | 用户数据内容与元数据 |
内省演示
此演示展示了如何使用 ros2 service echo 管理服务自省和监控服务数据通信。
内省服务节点:
https://github.com/ros2/demos/blob/jazzy/demo_nodes_cpp/src/services/introspection_service.cpp
#include <cinttypes> // 包含固定宽度整数类型的头文件
#include <memory> // 包含智能指针库
#include <vector> // 包含向量容器库
#include "rcl/service_introspection.h" // 包含服务内省的头文件
#include "rclcpp/qos.hpp" // 包含质量服务(QoS)设置的头文件
#include "rclcpp/rclcpp.hpp" // 包含ROS 2的核心库
#include "rclcpp_components/register_node_macro.hpp" // 包含注册节点宏的头文件
#include "example_interfaces/srv/add_two_ints.hpp" // 包含示例服务AddTwoInts的头文件
#include "rcl_interfaces/msg/set_parameters_result.hpp" // 包含设置参数结果消息的头文件
#include "demo_nodes_cpp/visibility_control.h" // 包含可见性控制的头文件
// 这个演示程序展示了如何通过参数动态配置服务内省。
// 该程序由一个服务节点(IntrospectionServiceNode)组成,该节点监听'/add_two_ints'服务的客户端请求。
// 当客户端连接并发送请求时,它会将两个整数相加并返回结果。
//
// 上述是一个相当常见的ROS 2服务,但该程序试图展示的是内省功能。
// IntrospectionServiceNode有一个名为'service_configure_introspection'的字符串参数。
// 如果该参数设置为'disabled'(默认值),则不会进行内省。
// 如果该参数设置为'metadata'(参见下面的参数设置详情),则会将基本元数据(时间戳、序列号等)发送到一个隐藏的主题/add_two_ints/_service_event。
//
// 要查看此功能,请运行以下命令:
//
// ros2 launch demo_nodes_cpp introspect_services_launch.py
// 由于内省的默认设置是'disabled',这与普通的客户端和服务器没有区别。
// 不会创建额外的主题,也不会发送内省数据。然而,动态更改内省配置是完全支持的。
// 这可以通过运行'ros2 param set /introspection_service service_configure_introspection metadata'来实现,
// 这将配置服务开始将内省元数据发送到/add_two_ints/_service_event。
//
// 一旦设置了参数,可以通过运行以下命令查看内省数据:
// ros2 topic echo /add_two_ints/_service_event
namespace demo_nodes_cpp // 定义命名空间demo_nodes_cpp
{
class IntrospectionServiceNode : public rclcpp::Node // 定义IntrospectionServiceNode类,继承自rclcpp::Node
{
public:
DEMO_NODES_CPP_PUBLIC
explicit IntrospectionServiceNode(const rclcpp::NodeOptions & options) // 构造函数,接受节点选项作为参数
: Node("introspection_service", options) // 调用基类构造函数,设置节点名称为"introspection_service"
{
auto handle_add_two_ints = [this](
const std::shared_ptr<rmw_request_id_t> request_header,
const std::shared_ptr<example_interfaces::srv::AddTwoInts::Request> request,
std::shared_ptr<example_interfaces::srv::AddTwoInts::Response> response) -> void // 响应参数
{
(void)request_header; // 忽略请求头
RCLCPP_INFO( // 打印信息日志
this->get_logger(), "Incoming request\na: %" PRId64 " b: %" PRId64,
request->a, request->b);
response->sum = request->a + request->b; // 计算并设置响应结果
};
// 创建一个服务,使用回调函数处理请求
srv_ = create_service<example_interfaces::srv::AddTwoInts>("add_two_ints", handle_add_two_ints);
auto on_set_parameter_callback = // 定义设置参数的回调函数
[](std::vector<rclcpp::Parameter> parameters) {
rcl_interfaces::msg::SetParametersResult result; // 创建设置参数结果消息
result.successful = true; // 设置结果为成功
for (const rclcpp::Parameter & param : parameters) { // 遍历参数
if (param.get_name() != "service_configure_introspection") { // 如果参数名称不是'service_configure_introspection'
continue; // 跳过
}
if (param.get_type() != rclcpp::ParameterType::PARAMETER_STRING) { // 如果参数类型不是字符串
result.successful = false; // 设置结果为失败
result.reason = "must be a string"; // 设置失败原因
break; // 退出循环
}
if (param.as_string() != "disabled" && param.as_string() != "metadata" &&
param.as_string() != "contents") // 如果参数值不是'disabled'、'metadata'或'contents'
{
result.successful = false; // 设置结果为失败
result.reason = "must be one of 'disabled', 'metadata', or 'contents'"; // 设置失败原因
break; // 退出循环
}
}
return result; // 返回结果
};
auto post_set_parameter_callback = // 定义设置参数后的回调函数
[this](const std::vector<rclcpp::Parameter> & parameters) {
for (const rclcpp::Parameter & param : parameters) { // 遍历参数
if (param.get_name() != "service_configure_introspection") { // 如果参数名称不是'service_configure_introspection'
continue; // 跳过
}
rcl_service_introspection_state_t introspection_state = RCL_SERVICE_INTROSPECTION_OFF; // 定义内省状态,默认关闭
if (param.as_string() == "disabled") { // 如果参数值为'disabled'
introspection_state = RCL_SERVICE_INTROSPECTION_OFF; // 设置内省状态为关闭
} else if (param.as_string() == "metadata") { // 如果参数值为'metadata'
introspection_state = RCL_SERVICE_INTROSPECTION_METADATA; // 设置内省状态为元数据
} else if (param.as_string() == "contents") { // 如果参数值为'contents'
introspection_state = RCL_SERVICE_INTROSPECTION_CONTENTS; // 设置内省状态为内容
}
this->srv_->configure_introspection( // 配置服务内省
this->get_clock(), rclcpp::SystemDefaultsQoS(), introspection_state);
break; // 退出循环
}
};
on_set_parameters_callback_handle_ = this->add_on_set_parameters_callback( // 添加设置参数的回调函数
on_set_parameter_callback);
post_set_parameters_callback_handle_ = this->add_post_set_parameters_callback( // 添加设置参数后的回调函数
post_set_parameter_callback);
this->declare_parameter("service_configure_introspection", "disabled"); // 声明参数'service_configure_introspection',默认值为'disabled'
}
private:
rclcpp::Service<example_interfaces::srv::AddTwoInts>::SharedPtr srv_; // 服务指针
rclcpp::node_interfaces::OnSetParametersCallbackHandle::SharedPtr
on_set_parameters_callback_handle_; // 设置参数的回调函数句柄
rclcpp::node_interfaces::PostSetParametersCallbackHandle::SharedPtr
post_set_parameters_callback_handle_; // 设置参数后的回调函数句柄
};
} // namespace demo_nodes_cpp // 命名空间结束
RCLCPP_COMPONENTS_REGISTER_NODE(demo_nodes_cpp::IntrospectionServiceNode) // 注册节点默认情况下禁用服务自省,因此用户需要启用它才能在服务服务器上调用 configure_introspection 。在此演示中, IntrospectionServiceNode 使用名为 `service_configure_introspection 的参数来配置服务自省状态。
首先我们需要开始 IntrospectionServiceNode 。
$ ros2 run demo_nodes_cpp introspection_service要更改服务自省状态,我们需要按如下方式设置 configure_introspection 参数。
### User data contents with metadata
$ ros2 param set /introspection_service service_configure_introspection contents
### Or only metadata
$ ros2 param set /introspection_service service_configure_introspection metadata
### To disable
$ ros2 param set /introspection_service service_configure_introspection disabled
cxy@cxy-Ubuntu2404:~$ ros2 param set /introspection_service service_configure_introspection contents
Set parameter successful内省客户端节点:
https://github.com/ros2/demos/blob/jazzy/demo_nodes_cpp/src/services/introspection_client.cpp
#include <chrono> // 包含时间库
#include <memory> // 包含智能指针库
#include <vector> // 包含向量容器库
#include "rcl/service_introspection.h" // 包含服务内省的头文件
#include "rclcpp/qos.hpp" // 包含质量服务(QoS)设置的头文件
#include "rclcpp/rclcpp.hpp" // 包含ROS 2的核心库
#include "rclcpp_components/register_node_macro.hpp" // 包含注册节点宏的头文件
#include "example_interfaces/srv/add_two_ints.hpp" // 包含示例服务AddTwoInts的头文件
#include "rcl_interfaces/msg/set_parameters_result.hpp" // 包含设置参数结果消息的头文件
#include "demo_nodes_cpp/visibility_control.h" // 包含可见性控制的头文件
// 这个演示程序展示了如何通过参数动态配置客户端内省。
// 该程序由一个客户端节点(IntrospectionClientNode)组成,该节点有一个每500毫秒运行一次的定时器回调。
// 如果服务尚未准备好,则不进行进一步工作。
// 如果客户端当前没有正在进行的请求,则创建一个新的AddTwoInts服务请求,并异步发送给服务。
// 当该请求完成时,它将标志设置为没有请求在进行中,以便发送另一个请求。
//
// 上述是一个相当常见的ROS 2客户端,但该程序试图展示的是内省功能。
// IntrospectionClientNode有一个名为'client_configure_introspection'的字符串参数。
// 如果该参数设置为'disabled'(默认值),则不会进行内省。
// 如果该参数设置为'metadata'(参见下面的参数设置详情),则会将基本元数据(时间戳、序列号等)发送到一个隐藏的主题/add_two_ints/_service_event。
//
// 要查看此功能,请运行以下命令:
//
// ros2 launch demo_nodes_cpp introspect_services_launch.py
// 由于内省的默认设置是'disabled',这与普通的客户端和服务器没有区别。
// 不会创建额外的主题,也不会发送内省数据。然而,动态更改内省配置是完全支持的。
// 这可以通过运行'ros2 param set /introspection_client client_configure_introspection metadata'来实现,
// 这将配置客户端开始将内省元数据发送到/add_two_ints/_service_event。
//
// 一旦设置了参数,可以通过运行以下命令查看内省数据:
// ros2 topic echo /add_two_ints/_service_event
namespace demo_nodes_cpp // 定义命名空间demo_nodes_cpp
{
class IntrospectionClientNode : public rclcpp::Node // 定义IntrospectionClientNode类,继承自rclcpp::Node
{
public:
DEMO_NODES_CPP_PUBLIC
explicit IntrospectionClientNode(const rclcpp::NodeOptions & options) // 构造函数,接受节点选项作为参数
: Node("introspection_client", options) // 调用基类构造函数,设置节点名称为"introspection_client"
{
client_ = create_client<example_interfaces::srv::AddTwoInts>("add_two_ints"); // 创建AddTwoInts服务客户端
auto on_set_parameter_callback = // 定义设置参数的回调函数
[](std::vector<rclcpp::Parameter> parameters) {
rcl_interfaces::msg::SetParametersResult result; // 创建设置参数结果消息
result.successful = true; // 设置结果为成功
for (const rclcpp::Parameter & param : parameters) { // 遍历参数
if (param.get_name() != "client_configure_introspection") { // 如果参数名称不是'client_configure_introspection'
continue; // 跳过
}
if (param.get_type() != rclcpp::ParameterType::PARAMETER_STRING) { // 如果参数类型不是字符串
result.successful = false; // 设置结果为失败
result.reason = "must be a string"; // 设置失败原因
break; // 退出循环
}
if (param.as_string() != "disabled" && param.as_string() != "metadata" &&
param.as_string() != "contents") // 如果参数值不是'disabled'、'metadata'或'contents'
{
result.successful = false; // 设置结果为失败
result.reason = "must be one of 'disabled', 'metadata', or 'contents'"; // 设置失败原因
break; // 退出循环
}
}
return result; // 返回结果
};
auto post_set_parameter_callback = // 定义设置参数后的回调函数
[this](const std::vector<rclcpp::Parameter> & parameters) {
for (const rclcpp::Parameter & param : parameters) { // 遍历参数
if (param.get_name() != "client_configure_introspection") { // 如果参数名称不是'client_configure_introspection'
continue; // 跳过
}
rcl_service_introspection_state_t introspection_state = RCL_SERVICE_INTROSPECTION_OFF; // 定义内省状态,默认关闭
if (param.as_string() == "disabled") { // 如果参数值为'disabled'
introspection_state = RCL_SERVICE_INTROSPECTION_OFF; // 设置内省状态为关闭
} else if (param.as_string() == "metadata") { // 如果参数值为'metadata'
introspection_state = RCL_SERVICE_INTROSPECTION_METADATA; // 设置内省状态为元数据
} else if (param.as_string() == "contents") { // 如果参数值为'contents'
introspection_state = RCL_SERVICE_INTROSPECTION_CONTENTS; // 设置内省状态为内容
}
this->client_->configure_introspection( // 配置客户端内省
this->get_clock(), rclcpp::SystemDefaultsQoS(), introspection_state);
break; // 退出循环
}
};
on_set_parameters_callback_handle_ = this->add_on_set_parameters_callback( // 添加设置参数的回调函数
on_set_parameter_callback);
post_set_parameters_callback_handle_ = this->add_post_set_parameters_callback( // 添加设置参数后的回调函数
post_set_parameter_callback);
this->declare_parameter("client_configure_introspection", "disabled"); // 声明参数'client_configure_introspection',默认值为'disabled'
timer_ = this->create_wall_timer( // 创建定时器,每500毫秒运行一次
std::chrono::milliseconds(500),
[this]() {
if (!client_->service_is_ready()) { // 如果服务尚未准备好
return; // 返回
}
if (!request_in_progress_) { // 如果没有正在进行的请求
auto request = std::make_shared<example_interfaces::srv::AddTwoInts::Request>(); // 创建AddTwoInts请求
request->a = 2; // 设置请求参数a
request->b = 3; // 设置请求参数b
request_in_progress_ = true; // 设置请求进行中标志
client_->async_send_request( // 异步发送请求
request,
[this](rclcpp::Client<example_interfaces::srv::AddTwoInts>::SharedFuture cb_f) // 请求完成回调
{
request_in_progress_ = false; // 重置请求进行中标志
RCLCPP_INFO(get_logger(), "Result of add_two_ints: %ld", cb_f.get()->sum); // 打印请求结果
}
);
return; // 返回
}
});
}
private:
rclcpp::Client<example_interfaces::srv::AddTwoInts>::SharedPtr client_; // 客户端指针
rclcpp::TimerBase::SharedPtr timer_; // 定时器指针
rclcpp::node_interfaces::OnSetParametersCallbackHandle::SharedPtr
on_set_parameters_callback_handle_; // 设置参数的回调函数句柄
rclcpp::node_interfaces::PostSetParametersCallbackHandle::SharedPtr
post_set_parameters_callback_handle_; // 设置参数后的回调函数句柄
bool request_in_progress_{false}; // 请求进行中标志
};
} // namespace demo_nodes_cpp // 命名空间结束
RCLCPP_COMPONENTS_REGISTER_NODE(demo_nodes_cpp::IntrospectionClientNode) // 注册节点然后,我们以相同的方式启动和配置 IntrospectionClientNode 。
ros2 run demo_nodes_cpp introspection_client更改服务自省状态以设置 configure_introspection 参数如下。
### User data contents with metadata
$ ros2 param set /introspection_client client_configure_introspection contents
### Or only metadata
$ ros2 param set /introspection_client client_configure_introspection metadata
### To disable
$ ros2 param set /introspection_client client_configure_introspection disabled在本教程中,以下是服务自省状态 CONTENTS 在 IntrospectionServiceNode 和 METADATA 在 IntrospectionClientNode 上的示例输出。要监控 IntrospectionClientNode 和 IntrospectionServiceNode 之间的服务通信,让我们运行它:
$ ros2 service echo --flow-style /add_two_ints
info:
event_type: REQUEST_SENT
stamp:
sec: 1709432402
nanosec: 680094264
client_gid: [1, 15, 0, 18, 86, 208, 115, 86, 0, 0, 0, 0, 0, 0, 21, 3]
sequence_number: 247
request: []
response: []
---
info:
event_type: REQUEST_RECEIVED
stamp:
sec: 1709432402
nanosec: 680459568
client_gid: [1, 15, 0, 18, 86, 208, 115, 86, 0, 0, 0, 0, 0, 0, 20, 4]
sequence_number: 247
request: [{a: 2, b: 3}]
response: []
---
info:
event_type: RESPONSE_SENT
stamp:
sec: 1709432402
nanosec: 680765280
client_gid: [1, 15, 0, 18, 86, 208, 115, 86, 0, 0, 0, 0, 0, 0, 20, 4]
sequence_number: 247
request: []
response: [{sum: 5}]
---
info:
event_type: RESPONSE_RECEIVED
stamp:
sec: 1709432402
nanosec: 681027998
client_gid: [1, 15, 0, 18, 86, 208, 115, 86, 0, 0, 0, 0, 0, 0, 21, 3]
sequence_number: 247
request: []
response: []
---
...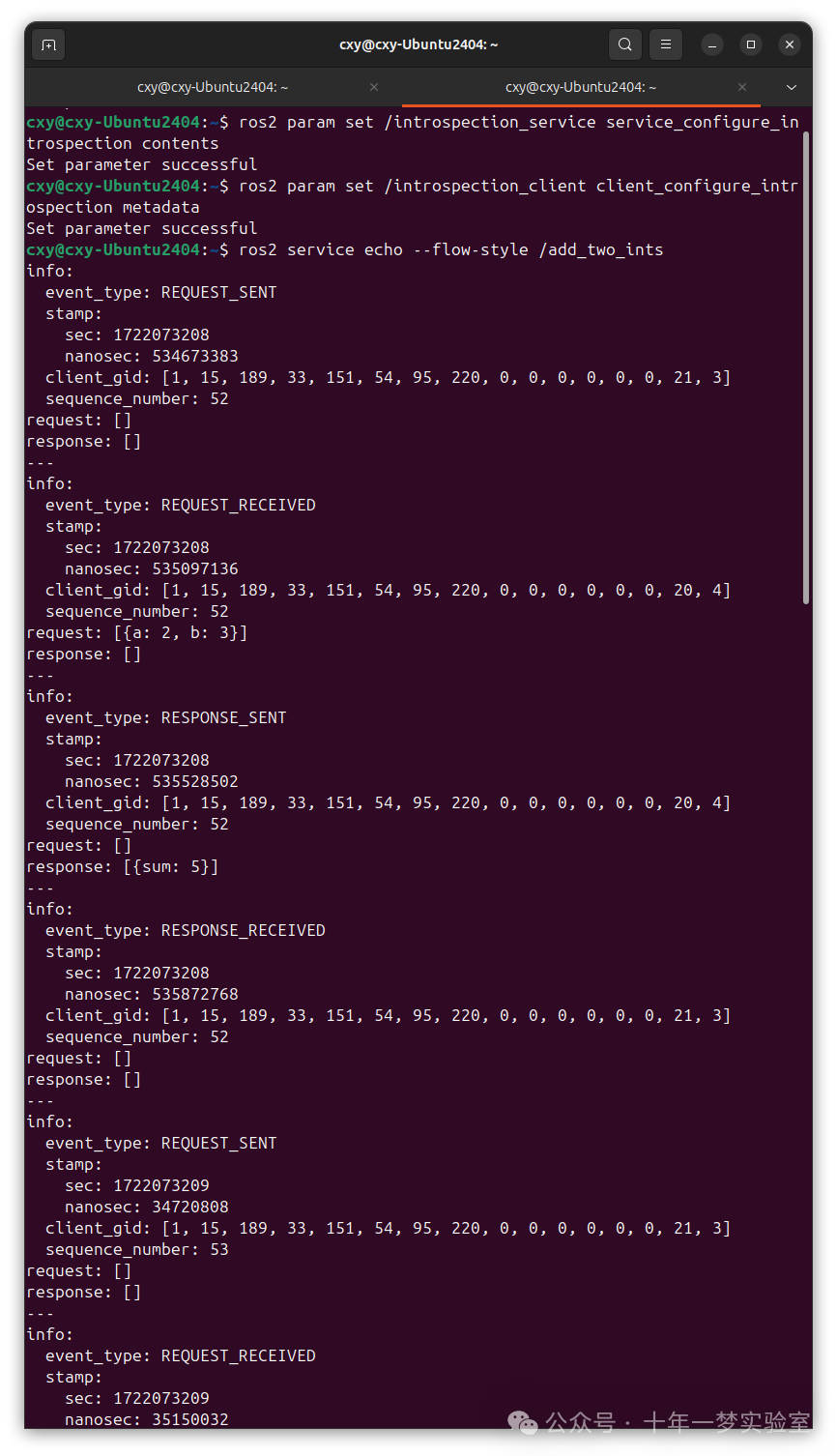
您可以看到 event_type: REQUEST_SENT 和 event_type: RESPONSE_RECEIVED ,这些自省服务事件发生在 IntrospectionClientNode 。这些事件不包括 request 和 response 字段中的任何内容,这是因为 IntrospectionClientNode 的服务自省状态设置为 METADATA 。另一方面,来自 IntrospectionServiceNode 的 event_type: REQUEST_RECEIVED 和 event_type: RESPONSE_SENT 事件包括 request: [{a: 2, b: 3}] 和 response: [{sum: 5}] ,因为自省状态设置为 CONTENTS 。
相关内容
服务自省客户端示例 (rclcpp) 和服务自省服务示例 (rclcpp).
服务自省客户端和服务示例 (rclpy). https://github.com/ros2/demos/blob/jazzy/demo_nodes_py/demo_nodes_py/services/introspection.py
服务内省 REP-2012. https://github.com/ros-infrastructure/rep/pull/360

















 598
598

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









