




本文给出一个基于DS-TWR(双边双向测距)的平面定位MATLAB例程,包含模拟数据生成、距离计算和最小二乘定位。代码注释详细,可直接运行。
代码说明
1. 参数设置
- 定义光速、时间噪声、基站坐标、目标真实坐标和时钟漂移参数。
- 时钟漂移参数(α和β)模拟设备时钟频率的微小偏差。
2. 数据生成
- 对每个基站计算真实传播时间。
- 模拟两次往返时间测量值( T _ r o u n d 1 T\_round1 T_round1, T _ r o u n d 2 T\_round2 T_round2)和回复时间( T _ r e p l y 1 T\_reply1 T_reply1, T _ r e p l y 2 T\_reply2 T_reply2),包含时钟漂移和高斯噪声。
- 使用DS-TWR公式计算实际距离。
3. 定位算法
- 使用非线性最小二乘法(
lsqnonlin)最小化测距误差平方和。 - 初始猜测设为基站质心以提高收敛性。
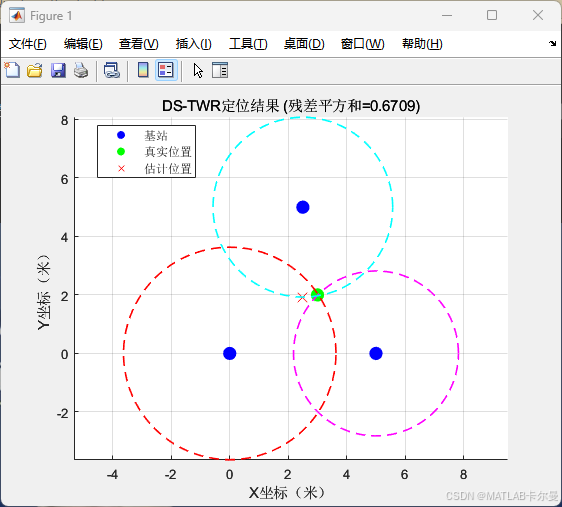
4. 可视化
- 绘制基站、真实位置和估计位置。
- 显示测距圆环,直观展示测距结果与定位关系。
- 输出定位误差。
运行结果
定位结果示意图:
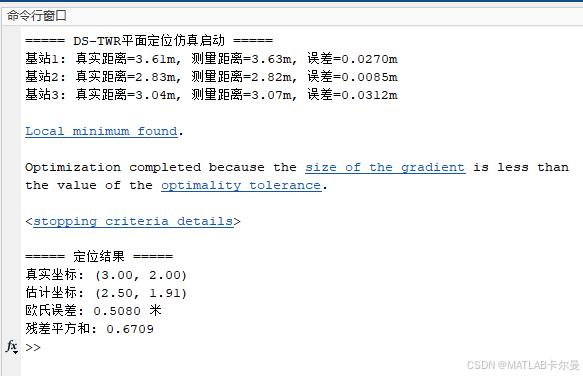
命令行窗口输出结果的截图:
MATLAB源代码
部分代码展示:
% 双边双向测距 (Double-sided two way ranging-DS_TWR)例程,3基站二维
% 2025-04-12/Ver1
%% 系统初始化
clc; clear; close all;
rng(0);
fprintf('===== DS-TWR平面定位仿真启动 =====\n');
%% 物理参数设置
c = 3e8; % 光速(m/s),电磁波传播基准
fs = 1e-9; % 时间单位:1 ns(满足UWB时间分辨率要求)
sigma_noise = 0.1e-9; % 时间噪声标准差(ns),模拟硬件抖动
% 基站布局(三角形布局优化定位精度)
anchor_pos = [0, 0; % 基站1坐标
5, 0; % 基站2坐标
2.5, 5]; % 基站3坐标(形成非共线布局)
target_true = [3, 2]; % 目标真实坐标(用于误差评估)
% 时钟漂移参数(模拟设备时钟不同步)
alpha = 1 + 50e-6; % 设备A时钟频率偏差(+50ppm)
beta = 1 - 30e-6; % 设备B时钟频率偏差(-30ppm)
完整代码下载链接:https://download.youkuaiyun.com/download/callmeup/90610625
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 408
408

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











