



 研究表明,在自动辅助驾驶系统中,动态控制转移成为人机协作的关键。驾驶员与系统间的互动不仅重塑了驾驶任务,还影响了驾驶员的角色转变。通过对SuperCruise系统的研究发现,驾驶员倾向于使用更高阶的自动化功能,但在不同自动化级别间频繁切换。
研究表明,在自动辅助驾驶系统中,动态控制转移成为人机协作的关键。驾驶员与系统间的互动不仅重塑了驾驶任务,还影响了驾驶员的角色转变。通过对SuperCruise系统的研究发现,驾驶员倾向于使用更高阶的自动化功能,但在不同自动化级别间频繁切换。
不管是ADAS辅助驾驶,还是高阶自动驾驶,这些智能化功能的落地,带来的不仅仅是汽车的营销卖点,还在重塑驾驶任务、驾驶员角色以及系统人机交互。
这其中,动态控制转移(TOC)是未来很长一段时间在自动辅助驾驶系统激活状态下,人机协作需要重点关注的事项。
一直以来,测试及监管机构认为,对自动化功能的过度依赖,造成驾驶员不理解或不采取必要的纠正措施,ADAS系统基本上是无效的。
比如,车道保持功能,如果没有明显的车道标记,褪色或模糊等等情况下,功能就不起作用。但往往,驾驶员容易疏忽功能的局限性。
此前,美国国家公路交通安全管理局对5470起报告的车祸数据分析,有34%的车祸是由车道偏离引起的,原因是司机睡着或丧失了行为能力。
“过去,考驾照是为了训练驾驶员并验证是否掌握基本的驾驶技能。未来,汽车制造商或者监管机构可能要出台法规,要求不同品牌的车主需要测试对ADAS系统的掌握能力。”一些监管机构的工作人员表示。
这将取决于汽车制造商能否将人机交互系统的能力提升到一个新的水平。
近日,麻省理工学院发布了一项新的研究结果,研究人员基于通用凯迪拉克的超级巡航(L2级自动辅助驾驶)来分析驾驶员和系统之间的行为关系。
“即便是双手离开方向盘的情况下,我们发现驾驶员和系统之间仍有高度的协作。”这篇题为《真实世界驾驶中驾驶员行为和自动化的使用》的论文,第一次深入研究随着新车搭载功能的不断丰富,人们是如何使用驾驶员辅助系统的。
这个研究项目由14名参与者,在1个月时间内分别驾驶配备Super Cruise系统的凯迪拉克CT6,共行驶1690次(里程累计22,108英里),共计5343个TOC,包括手动驾驶、L1级ACC和L2级超级巡航三种状态。
一、
研究报告指出,在自动辅助驾驶状态下,驾驶行为已经成为驾驶员和系统之间的密切协作,其特征是动态控制转移(TOC)。当最小的ODD条件没有满足时,系统发起的TOC接管请求就会发生。
另一方面,驾驶员发起的TOC可能是对系统故障、功能缺失或任意情况的响应或预期。随着动态驾驶任务的自动化程度越来越高,驾驶员的角色转向了监控。
这就非常考验驾驶员的表现和对道路行驶状况的持续监控。研究表明,与手动驾驶相比,自动驾驶的长期使用可能会导致驾驶员更慢的危险检测,以及更长的反应时间。
首先,我们需要回答两个问题:驾驶员通常会做什么?驾驶员能做什么?这需要汽车制造商对驾驶行为数据的持续监测,来评估驾驶员的行为风格,从而调整系统接管的一些细节处理。
而一项研究发现,特斯拉的Autopilot辅助驾驶系统需要频繁地做出关于系统参与和脱离的复杂决定,这背后表明:除了系统自动脱离或驾驶员主动干预外,还有很多其他形式的TOC存在,并与驾驶安全密切相关。
研究人员使用了驾驶员行为的层次模型,设计用来解释和预测复杂、真实的道路行为,分解为三个层次:战略(计划)、机动(战术)和控制(操作)。
战略层面包括确定行程目标、路线和时间限制。这种行为是有计划的、积极主动的,可能会在几秒钟以上的时间。
驾驶员行为的机动水平包括对车辆的战术控制,由驾驶员的战略目标(内在的)和当前的驾驶情况(外在的)共同决定,通常以秒为间隔执行。
驾驶员行为的最佳尺度是控制水平,它是即时的,并且经常涉及行动模式,这些模式通常需要在毫秒级执行。
研究报告认为,系统人机交互可以发生在驾驶员行为层次模型的每一层。每一层的TOC都具有不同的特征,包括运动学、交互模式和时间模式。比如,机动层面的TOC涉及到,比如超车时的间隙接受水平。
在进行测试之前,参与者接受了包括L1级(ACC)和L2级(Super Cruise)系统的培训,包括静态培训课程以及一个小时的实车培训。在培训过程中,参与者熟悉并被要求与系统进行各种可能的交互。
而作为测试车型,凯迪拉克CT6搭载的超级巡航是目前全球主流的L2级自动辅助驾驶系统,能够持续地同时执行动态驾驶任务的纵向和横向。
当系统启用时,可以实现驾驶员放开双手,同时基于舱内摄像头持续监测驾驶员注意力,并且提供基于高精地图的地理围栏,系统只能在有限的高速公路上被激活。
TOC也被划分为三种可能的类型:
1、战略性TOC,其特征是在相对较长的时间范围内(以分钟计)发生的主动行为,例如,在驶出高速公路附近,所有这些都是在驶出ODD之后发生的。
2、机动TOC,以秒为单位计算。例如,超车行为。
3、控制TOC,其特点是对可识别的环境输入作出快速和自动的反应涉及到毫秒级执行的自动动作模式。例如,响应前车的突然刹车,其特征是系统发出接管请求。
二、
最终的统计数据显示,累计的22108英里里程中,有67%里程处于手动驾驶状态,9%里程为单独启用ACC和25%里程的Super Cruise激活启用。
在特定路段的高速公路,驾驶者相对频繁地使用自动辅助驾驶,其中,Super Cruise占到了40%的比例,只有10%使用单独的ACC。不过,Super Cruise的使用并非是长时间连续的状态。
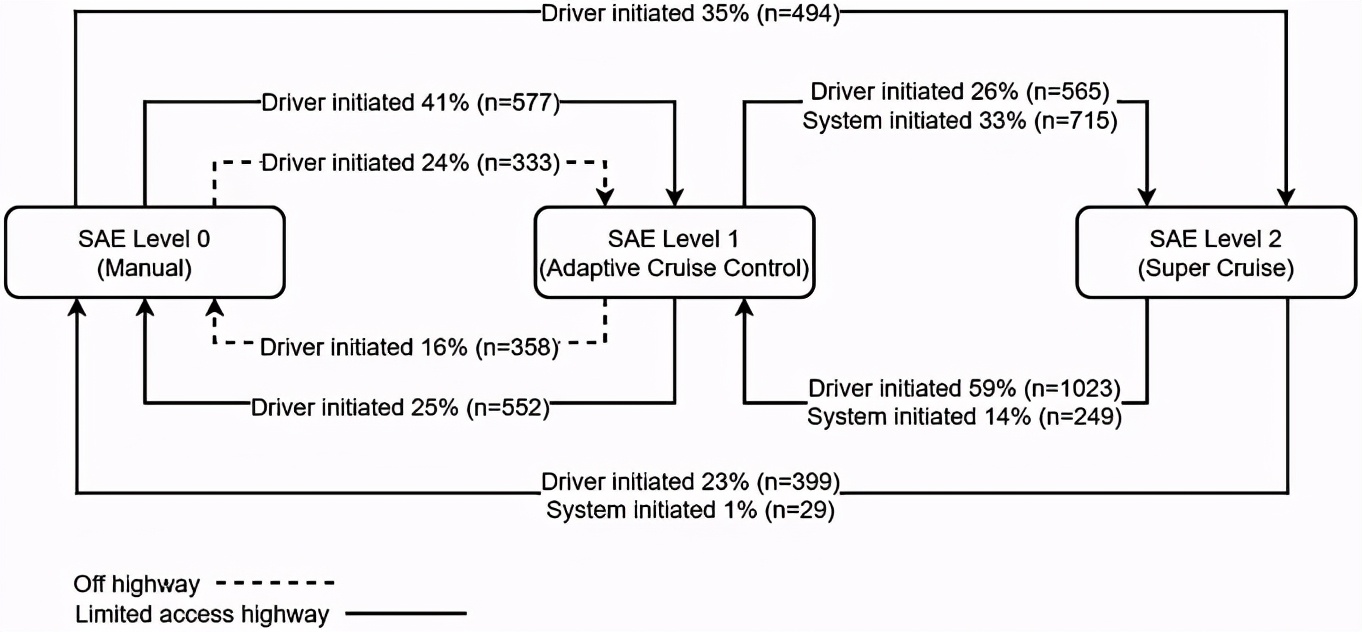
比如,驾驶员通常会控制车辆的纵向、横向或两种功能,并与系统之间进行频繁的动态切换。此外,在ACC和Super Cruise都可用的高速公路路段,与ACC相比,驾驶员更倾向于使用Super Cruise进行更长的距离和持续时间的使用。
另一组数据显示,当脱离Super Cruise时,驾驶员更有可能转向ACC(73%)而不是手动驾驶。由驾驶员发起的从Super Cruise到ACC的过渡,其中59%主要与前者缺失的功能(例如,自动变道)有关,而由系统发起的接管仅占14%,主要是对离开ODD的响应。
而完全脱离自动辅助驾驶系统的情况下,从Super Cruise直接到手动驾驶,主要是驾驶员发起的(占比23%),而系统发起的仅占1%(包括驾驶员疏忽或退出ODD)。
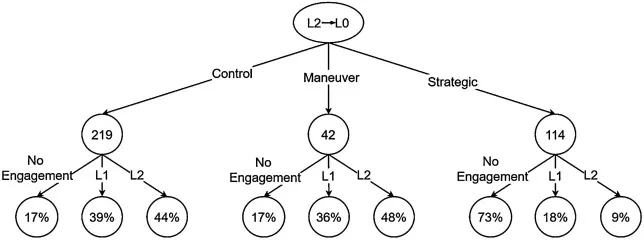
此外,在主动TOC(即战略和机动)中,驾驶员在启动脱离操作前更有可能把手放在方向盘上,而在被动TOC(即控制)中,驾驶员只有在启动脱离操作后才更有可能把手伸向方向盘。
同时,控制TOC的特征是车辆制动减速明显更强,同时,驾驶员在控制和机动TOC之后重新启用自动辅助驾驶系统的比例较高(达到80%)。相比之下,战略TOC发生之后,驾驶员在剩下的行程中有69%的比例继续保持手动驾驶,而不再重新启用ACC或者Super Cruise。
整体的研究数据结果表明,在可行的情况下,大多数驾驶员倾向于使用更高级别的自动化系统,即将动态驾驶任务的纵向和横向控制转交给系统,并适应以监控为导向的角色。
此外,驾驶员更习惯在不同的自动化级别之间进行动态转换,临时控制驾驶任务的纵向、横向或两者的功能。这些转换并不一定与减轻即时风险有关,而是为了执行超出当前系统能力的功能。
总体而言,在有限区域的高速公路上行驶时,驾驶员倾向于使用L1级(比如,ACC)系统作为较长时间使用L2级系统之间的间歇状态。
有趣的是,监测数据显示,尽管自动辅助驾驶在一部分非高速公路可以使用,但参与测试的驾驶员显然更倾向于手动驾驶。
此外,在接管系统的过程中,驾驶员在非紧急状态下,倾向于通过轻踩刹车踏板或按下接管按钮。紧急状态下,则更多是深踩制动踏板,车辆有明显的减速行为。
这意味着,人机交互的提前以及持续有效预警,对于后续系统及时退出、驾驶员安全接管至关重要。此外,对于ADAS的系统培训和安全使用经验,也是至关重要。
有证据表明,由于系统接管了部分驾驶任务,驾驶员容易将注意力从驾驶转移到次要任务,从而导致突发状态下,刹车反应时间减少并产生更大风险。
备注:关注高工智能汽车公众号,在底部对话框中输入:“人机交互报告”,获取完整版报告内容。



















 466
466



 到【灌水乐园】发言
到【灌水乐园】发言







