







🚀 动手学深度学习 - 17.1 马尔可夫决策过程(MDP)
理论 + 实战双视角,带你掌握强化学习建模的起点
🎯 前言:为什么我们需要 MDP?
在强化学习中,Agent 想要学习如何在环境中做决策,找到能获得最大长期奖励的策略。我们需要一个严谨的框架来定义“状态-动作-奖励-转移”,这就是 马尔可夫决策过程(MDP)。
1️⃣ MDP 的定义
马尔可夫决策过程(MDP) 是一个五元组:
![]()
| 符号 | 含义 |
|---|---|
| $\mathcal{S}$ | 状态空间,Agent 可能处于的所有状态 |
| $\mathcal{A}$ | 动作空间,Agent 可执行的所有动作 |
| $P(s' | s,a)$ |
| $R(s,a)$ | 奖励函数,执行 $a$ 后从 $s$ 获得的奖励 |
| $\gamma$ | 折扣因子,用于计算长期回报 |
🧠 我的理解:MDP 就像是为 RL 设计的一套世界规则,把每一步决策都纳入数学建模,同时提供了一个“试错反馈”的机制。
📷 图示:GridWorld 示例
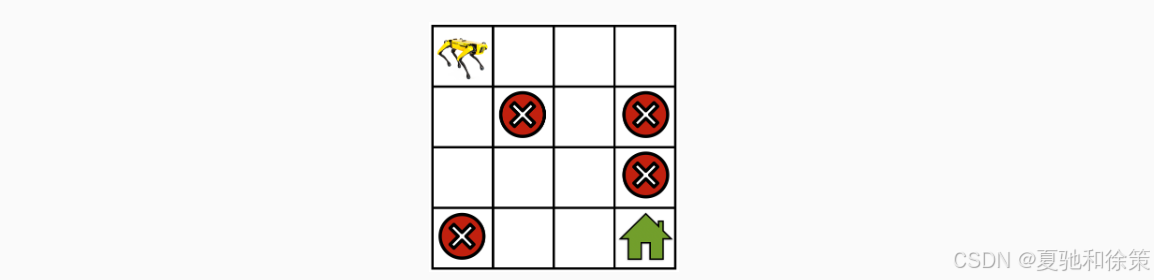
机器人需要从起点移动到目标(房子🏠),同时避开红色叉(陷阱❌)。
这就是一个典型的 MDP 建模场景:
-
状态:格子坐标
-
动作:上下左右移动
-
奖励:到终点 +10,掉陷阱 -10,其余动作 -1
-
转移:可能受风/概率随机影响
2️⃣ 回报与折扣因子
轨迹(trajectory)是一个序列:

✅ 总回报(Return):

如果轨迹无限长(如不停绕圈),总回报可能发散。
✅ 引入折扣因子 $\gamma$:

-
$\gamma$ 越小:更看重眼前奖励(短视)
-
$\gamma$ 越大:更看重长远目标(远见)
🔧 工程经验:
-
DQN/PPO 中常设 $\gamma=0.99$
-
对于像 GridWorld 这样“终点明确”的任务,使用 $\gamma$ 可以防止绕圈,促使模型快速达成目标
3️⃣ 马尔可夫假设的讨论
🧩 马尔可夫性定义:
状态转移只与当前状态和当前动作有关:
![]()
🎯 也就是说,历史信息通过“当前状态”完全封装了。
🚧 非马尔可夫例子:
如果一个机器人的位置不仅与当前位置、动作有关,还与“过去的速度/加速度”有关,则该系统不是马尔可夫的,除非我们把“位置 + 速度”都塞进状态空间!
✅ 结论:是否马尔可夫,取决于你怎么定义状态空间。
4️⃣ 小结(from 17.1.4)
| 概念 | 解释 |
|---|---|
| MDP 五元组 | $(\mathcal{S}, \mathcal{A}, P, R, \gamma)$ |
| 马尔可夫性 | 下一个状态只依赖当前状态和动作 |
| 强化学习目标 | 找到策略 $\pi$ 最大化期望累计回报 |
| 折扣回报公式 | $\sum_t \gamma^t r_t$,使得未来奖励有界 |
5️⃣ 实战练习设计(from 17.1.5)
🚙 练习一:MountainCar
-
状态空间:$(position, velocity)$
-
动作空间:${左推、右推、不动}$
-
奖励函数:
-
每一步 -1(鼓励尽快爬上山)
-
抵达终点后 episode 结束
-
🧠 经验:此任务 reward sparse,训练困难,建议使用 DDPG/PPO 等策略优化方法。
🕹️ 练习二:Pong(Atari 游戏)
-
状态空间:图像帧(或抽象 paddle+ball 的位置速度)
-
动作空间:${上、下、不动}$
-
奖励函数:
-
赢球 +1
-
输球 -1
-
其他时间 0
-
💡 建议搭配 DQN + CNN 特征提取模块 + ReplayBuffer 实现效果更佳。
✅ 总结一句话
马尔可夫决策过程是强化学习建模的根基,只有理解它,才真正进入了 RL 世界的大门。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











