







 本文详细介绍了三维空间中刚体的旋转矩阵,包括点、向量和坐标系的概念,坐标系间的欧式变换,以及旋转和平移变换。此外,还讲解了C++开源线性代数库Eigen的安装、引用和应用,包括矩阵和向量的定义、初始化、访问以及矩阵运算等基础知识。
本文详细介绍了三维空间中刚体的旋转矩阵,包括点、向量和坐标系的概念,坐标系间的欧式变换,以及旋转和平移变换。此外,还讲解了C++开源线性代数库Eigen的安装、引用和应用,包括矩阵和向量的定义、初始化、访问以及矩阵运算等基础知识。
一、旋转矩阵
对于刚体来说,其在空间中的状态由位置和姿态描述,称之为姿态。如,相机在的(0,0,0)处,这是在描述相机的位置。相机朝向为正前方,这是在描述相机的姿态。
1、点、向量和坐标系
1)定义
点:点是空间中的基本元素,没有长度和体积。
向量:由一个点指向另外一个点就是一个向量。!!!本书中坐标用列向量表示!!!
坐标系:点和向量要想与坐标联系起来,说先要选定一个坐标系。
2)点和向量的坐标
三维空间中点的坐标:在给定坐标系下可以直接表示为(x,y,z)
三维空间中向量的坐标:
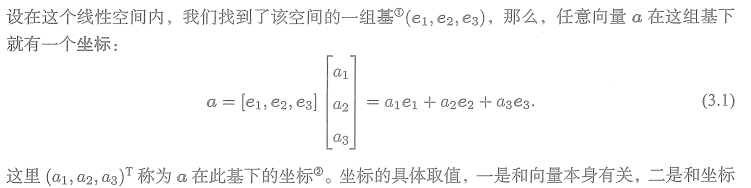
系与基的选取有关。其中基的长度为1,是空间中一组线性无关的向量。
3)向量之间的内积和外积
对于向量a,b,其内积可以写成
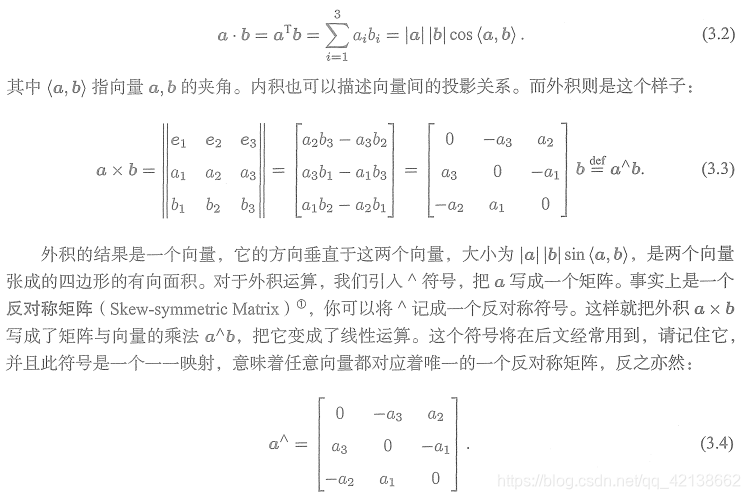
向量内积的结果是一个标量,大小为|a||b|cos<a,b>,描述向量间的投影关系。
向量外积的结果是一个矢量,大小为|a||b|sin<a,b>,方向垂直于这两个向量。
通过引入反对称符号^讲向量的外积变成一个矩阵和一个列向量相乘的线性运算。
反对称矩阵性质:
![]()
2、坐标系间的欧式变换
在实际应用中,我们通常会定义机器人坐标系和世界坐标系等多个坐标系,而同一个向量在不同坐标系下的坐标是不一样的,不同的坐标系中间差了一个欧式变换。如下图所示:
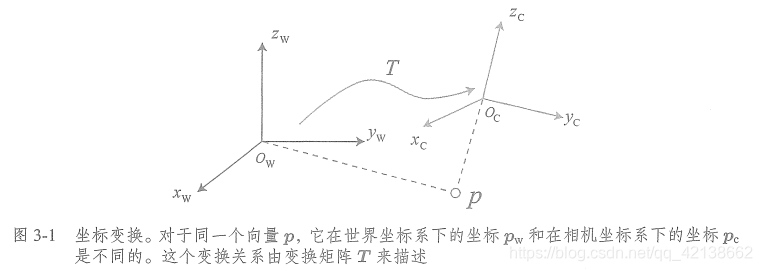
两个坐标系间的变换由一个旋转加一个平移组成,称之为刚体运动,这种运动的特点是同一向量在不同坐标系下的长度和夹角都不会变化。
1)坐标系间的旋转变换
旋转变换公式
如图3-1所示
设世界坐标系为,其中一组单位正交基为
,向量
在该坐标系下的坐标为
设机器人坐标系为,其中一组单位正交基为
,向量
在该坐标系下的坐标为
当坐标系和坐标系
间只存在旋转关系时,向量
在两坐标系下坐标关系为:
其中
,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1009
1009

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









