







三维空间的刚体运动
一个刚体在三维空间中的运动如何描述?
我们知道是由旋转加平移组成的,平移很简单,但是旋转有点麻烦。
三维空间的刚体运动的描述方式:旋转矩阵、变换矩阵、四元数、欧拉角。
刚体,不光有位置,而且还有姿态。相机可以看成是三维空间的一个刚体,位置指的就是相机在空间处于哪个地方?而姿态指的是相机的朝向(例如:相机位于(0, 0,0)点处,朝向正东方)但是这样去描述比较繁琐。
1)旋转矩阵
1、坐标系间的欧式变换
欧式变换:相机运动是一个刚体运动,他保证了同一个向量在各个不同的坐标系下的长度和夹角都不会发生变化,这种变化称之为欧式变换。
坐标系1的单位正交基:[e1,e2,e3]
点在坐标系1中的坐标:[a1,a2,a3]
坐标系2的单位正交基:[e1’,e2’,e3’]
点在坐标系2中的坐标:[a1’,a2’,a3’]
则转换关系如下:

R矩阵,描述了旋转前后同一个向量的坐标变换之间的关系,称之为旋转矩阵(行列式为1的正交矩阵)
旋转矩阵可以描述相机的旋转。
a’=Ra+t,其中t表示平移,这是一个完整的欧式变换。
其中:a为世界坐标系的向量a,经过一次旋转和一次平移t之后,得到了a’。平移只需要把旋转之后的坐标加上这个平移量就行。
2、外积:

外积只对三维向量存在定义,我们还能用外积表示向量的旋转
2)变换矩阵
上面的式子完整的表达了欧式空间的旋转和平移,不过存在一个小问题,就是这里的变换还不是一个线性关系,
假设我们经过了两次变换:

那么从a到c的变换就是:

但是这样写太过于复杂吧 ,我们引入齐次坐标和变换矩阵
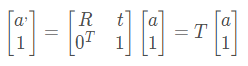
在三维向量的末尾添加1,将它变成一个四维向量,称之为齐次坐标。这个时候将旋转和平移写在了一个矩阵里面,整个关系变成一个线性关系。
T就是变换矩阵
3)欧拉角
1、旋转向量
旋转向量是旋转矩阵的另一种表达方式,使用一个三维向量来描述旋转,由旋转轴n和旋转角θ来刻画。从旋转向量到旋转矩阵的转换过程由罗德里格斯公式表明,具体形式如下:

2、旋转角:
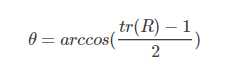
3、转轴:

4、欧拉角
那什么叫做欧拉角呢?
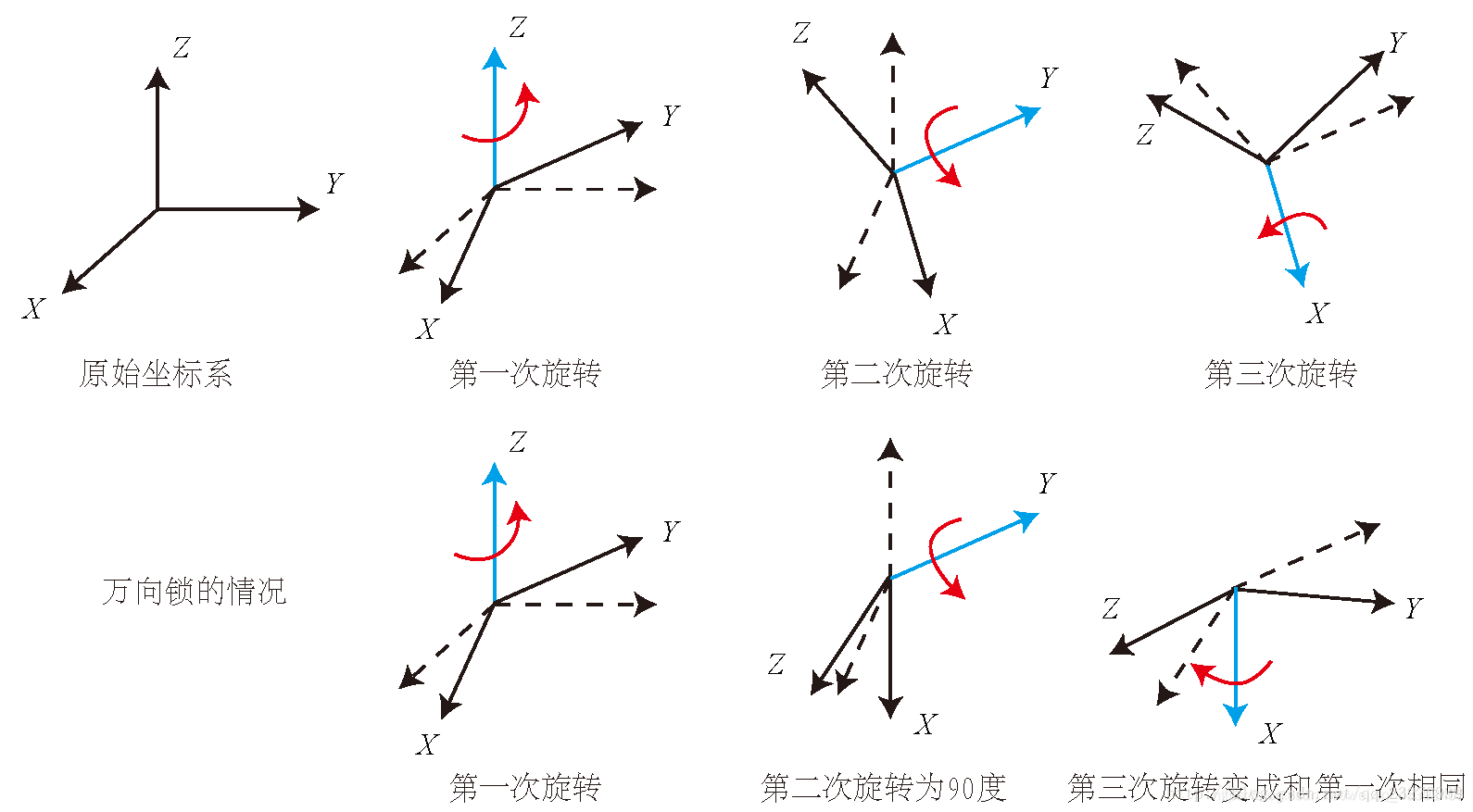
欧拉角提供了一种非常直观的方式来描述旋转,它使用三个分离的转角,即将一个旋转分解成三次饶不同轴的旋转。
ZYX 转角相当于把任意旋转分解成以下三个轴上的转角 :
1、绕物体的 Z 轴旋转,得到偏航角 yaw
2、绕旋转之后的 Y 轴旋转,得到俯仰角 pitch
3、绕旋转之后的 X 轴旋转,得到滚转角 roll
但是欧拉角的一个重大缺陷是会碰到万向锁问题:在俯仰角为±±90度时,第一次旋转与第三次旋转将使用同一个轴,使得系统丢失一个自由度。(万向锁问题)
4)四元数
1、四元数的定义
旋转矩阵用9个量描述3个自由度具有冗余性.
欧拉角和旋转向量是紧凑的,但是具有奇异性.
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 480
480

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









