










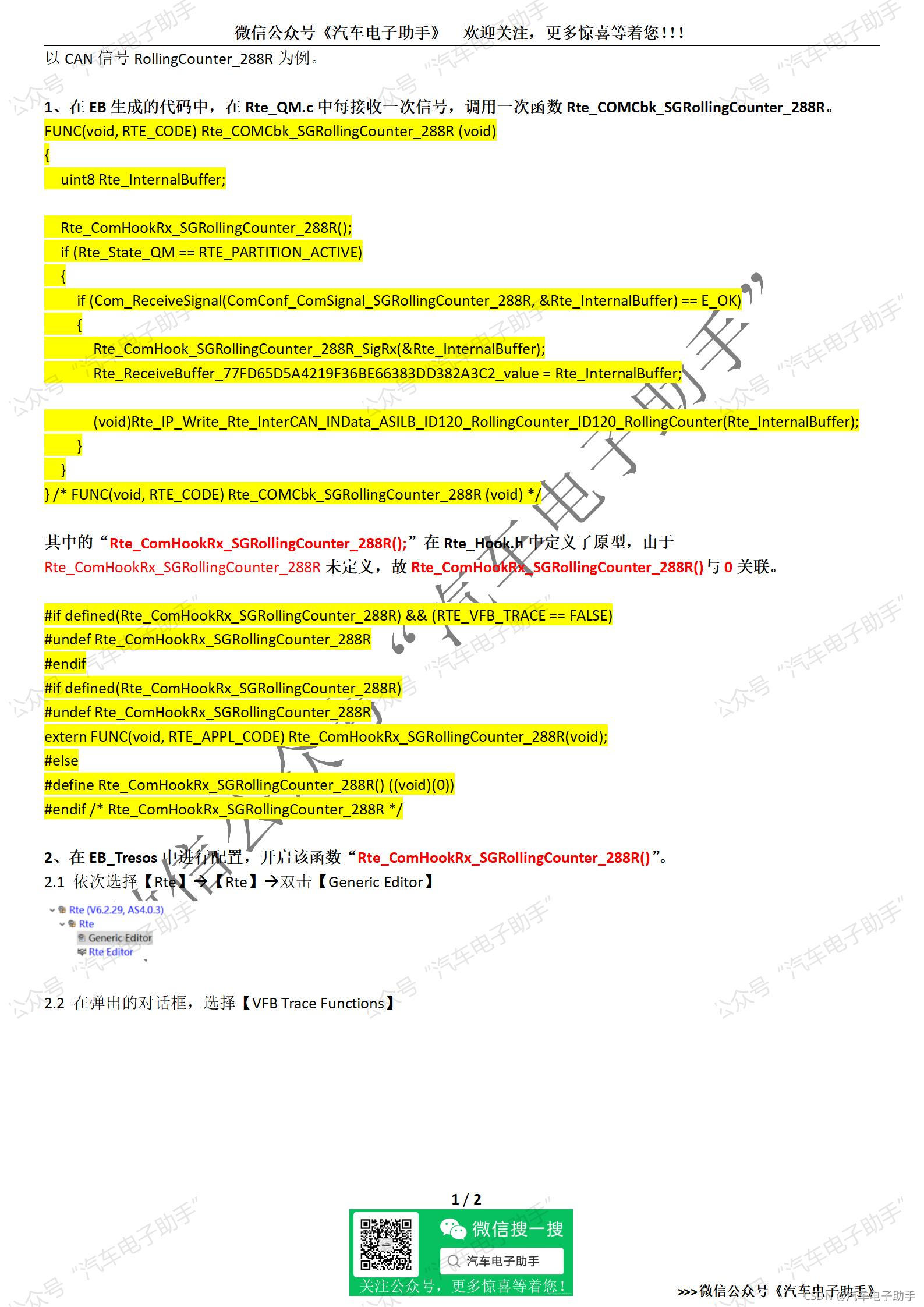
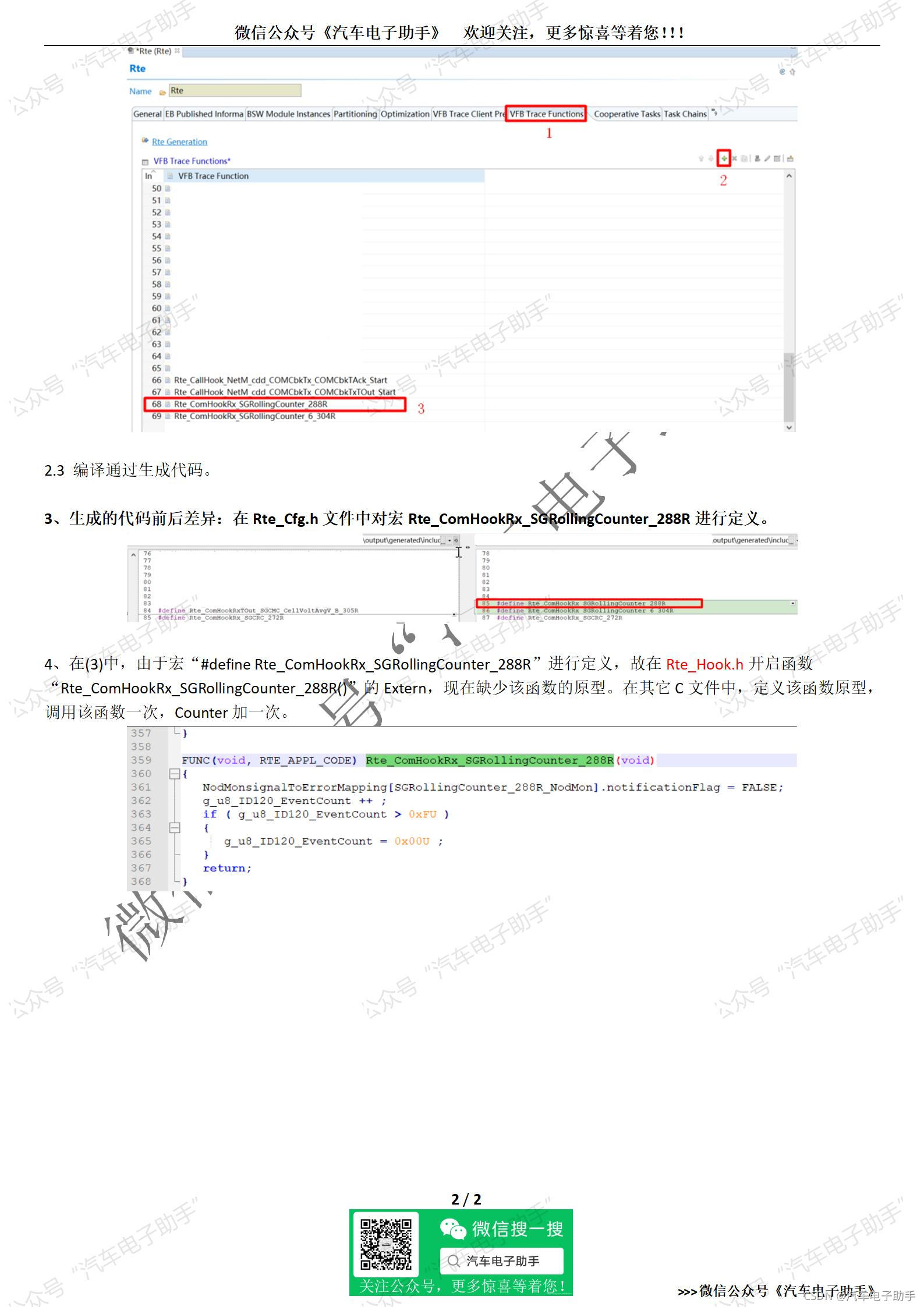
 这篇博客介绍了如何在Autosar工具EB_Tresos中统计CAN信号的接收次数,是Autosar从入门到精通实战篇的一部分。
这篇博客介绍了如何在Autosar工具EB_Tresos中统计CAN信号的接收次数,是Autosar从入门到精通实战篇的一部分。

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 11万+
11万+
评论

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
查看更多评论
添加红包

 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








