




PX4中间件
-
PX4中间件主要由内置传感器的驱动和基于发布-订阅(publish-subscribe)的中间件组成,其中发布-订阅中间件用于将这些传感器与飞行控制运行的应用程序进行通讯连接。
-
使用发布-订阅计划意味着:
-
系统是响应式的,即当有新的有效数据时系统能够立即更新。
-
系统是完全并行运行的。
-
系统组件能够在线程安全的方式下从任何地方使用数据。
-
地面站通讯结构
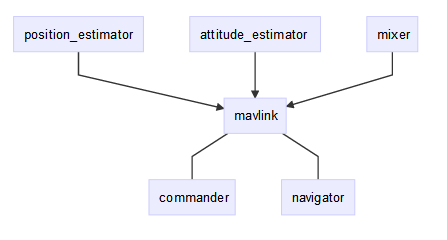
- 与地面站(GCS)之间的交互是通过一种“商业逻辑”应用程序来处理的,包括如 commander( 一般命令与控制,例如解锁 ) ,navigator ( 接受任务并将其转为底层导航的原始数据 ) 和 mavlink 应用, mavlink 用于接受 MAVLink 数据包并将其转换为板载 uORB 数据结构。这种隔离方式使架构更为清晰,可以避免系统对 MAVLink 过于依赖 。 MAVLink应用也会获取大量的传感器数据和状态估计值,并将其发送到地面站。

















 1336
1336

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









