




 本文详细介绍了PX4飞控系统的目录结构,包括硬件配置、编译过程、传感器驱动、通讯协议、任务调度和控制算法等内容。重点讨论了rcS启动脚本、源代码模块以及mavlink通信协议在系统中的作用。此外,还提到了驱动实现、应用模块和系统平台的底层实现。
本文详细介绍了PX4飞控系统的目录结构,包括硬件配置、编译过程、传感器驱动、通讯协议、任务调度和控制算法等内容。重点讨论了rcS启动脚本、源代码模块以及mavlink通信协议在系统中的作用。此外,还提到了驱动实现、应用模块和系统平台的底层实现。
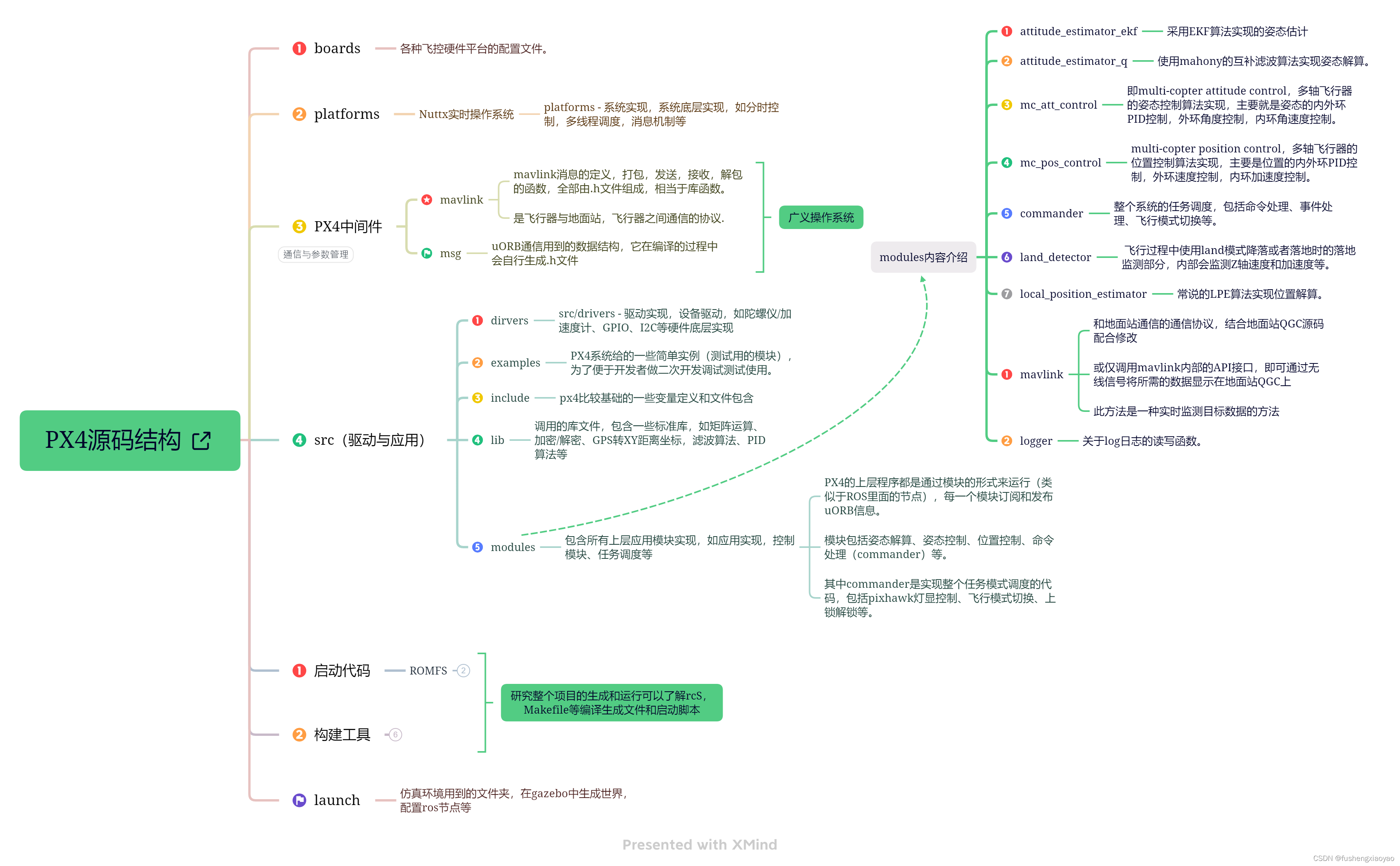
代码目录:
1 boards
各种飞控硬件平台的配置文件2 build
编译产生的目录,make之后生成的文件放置在这个目录3 cmake
cmake编译配置目录4 Documentation
开发者文档目录,包括代码说明等5 launch
仿真环境用到的文件,包括ROS节点配置等6 mavlink
通讯协议文件,定义和实现PX4与地面站之间的通讯协议。7 msg
uORB消息定义文件,定义PX4程序之间通讯的消息格式。8 platforms
系统平台实现的文件,包括PX4采用的Nuttx操作系统的源代码。9 ROMFS
系统启动调用的脚本,ROMFS\px4fmu_common\ini.d\rcS是启动脚本,rcS中又调用rc.sensors,rc.mc_apps等文件。
rcS:最先启动的脚本,负责挂载SD,启动uORB、配置系统参数等。
rc.sensors:启动传感器驱动。
rc.mc_apps:启动上层应用,如commander(指令处理)、att_control(姿态控制)、pos_control(位置控制)等。
10 src
源代码目录,包含驱动、测试示例、模块实现等源代码。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5496
5496

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









