







在ubuntu22.04下安装了ros2 humble,然后在gazebo官网发现了这张表,就安装了gazebo harmonic版本

发现ignition才是未来,老版gazebo将要走向终点了

启动一个实例,居然是用ign gazebo这个命令,我看其他新版gazebo都是 gz, gz_sim这样的
gz sim shapes.sdf

下面这个gazebo模型库提供了gazebo的很多模型,里面的sdf文件可以用来导入ignition版本gazebo
gazebo的模型库
本地路径下的gz sim 世界模型

通过右上角找到Resource Spawner来导入外部模型

添加模型路径 GZ_SIM_RESOURCE_PATH
echo "export GZ_SIM_RESOURCE_PATH="xxx/xxx/xxx/models"" >> ~/.bashrc
source ~/.bashrc
需要注意的是,导入的路径,需要是含有模型的.config文件的一级父目录,比如下面图中是turtlebot的例子,models下有一些机器人模型的定义包,里面含有.config文件,那么这个model路径就是我们需要给的GZ_SIM_RESOURCE_PATH值。
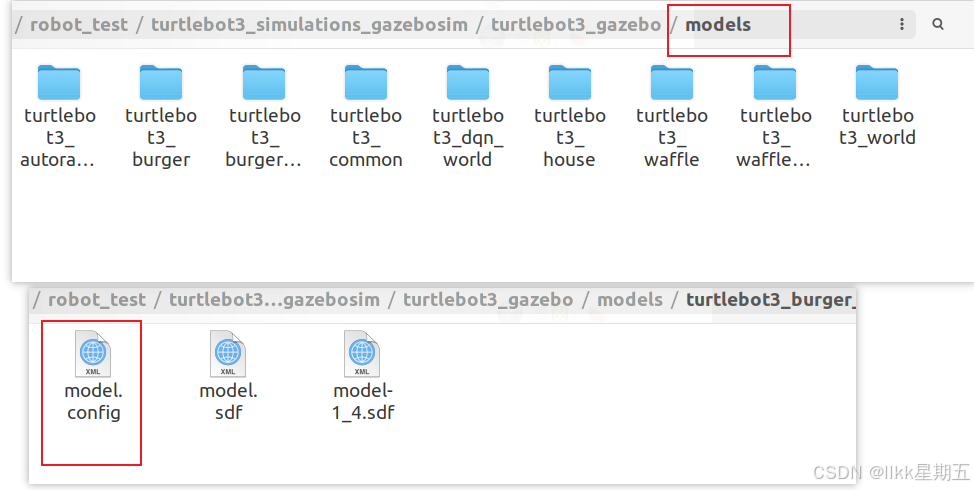
可以看到,可以在gazebo harmonic中引入了本地模型。

所以一般gazebo harmonic的机器人模型的文件框架应该是:
————————
models/
└── robot1/
│ ├── model.config # 模型元数据
│ ├── model.sdf # 模型描述文件
│ ├── meshes/
│ │ ├── burger_body.dae # 底盘几何
│ │ └── wheel.stl # 轮子几何
│ └── materials/
│ ├── scripts/
│ │ │ └── burger.material # 材质定义(如颜色、反光)
│ │ └── textures/
│ └── robot_tex.png # 表面纹理贴图
├── robot2/
........
meshes 目录:
作用:存放模型的 几何形状数据,定义机器人的三维外观。文件类型:
- dae (Collada):支持材质和纹理的通用格式。
- stl (Stereolithography):描述几何形状的三角网格,但无材质信息。
- obj:包含顶点、纹理坐标和法线信息的通用3D格式。
material 目录
作用:存放模型的 外观属性,定义颜色、纹理、反光特性等视觉效果。
文件类型:
- material 或 .mtl:材质配置文件(如定义金属、塑料的反射属性)。
- 纹理贴图文件(如 .png, .jpg):定义表面图案或颜色细节。

















 2980
2980

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









