




1. 概述
LOAM中用于防止非线性优化解退化的方法,指出原始参考代码中出现错误的地方,希望能帮助大家,同时供自己以后参考。
2. 理解
对于SLAM而言,视觉传感器需要纹理信息决定特征点,距离传感器需要空间几何结构信息决定特征点,在特征点缺乏时,状态估计方法会进行退化,为了解决这种退化问题,本文提出了一种在线方法。
处理退化的常用方法有:
- 1)当出现退化时
换一种方法;这要求在设计时需要一个备用方法可用 - 2)在状态估计过程中加入
人工约束,如恒速模型的约束。即使问题本身是可解决的情况下也会带来不必要的误差。
我们的方法是在原始问题的部分子空间添加约束。原始问题的解可以分为非退化方向和退化方向,在处理问题时,首先确定退化方向,然后将求出原始问题非退化方向的解,对于退化方向的解使用猜测值。在最后的实践算法中,只使用非线性优化解在非退化方向的分量,不考虑退化方向的分量。
正常情况下,约束应该是分布在空间中的多个方向,从各个角度约束解,如下面所示,绿色点表示问题的解,被非退化约束限制在了一个小区域。这样的解就比较准确,约束发生小变化时,解的变化也很小,被限制在一个局部区域,这样的解就是一个比较理想的解。

如果解的约束大多近似平行,那么他们就是退化的方向(蓝色箭头表示的方向),这个时候解在退化方向收到的约束就很差。考虑绝对平行时,解的约束也是一个平行的方向,那么这种情况下的解是需要避免的,如果其中一个约束发生了小的偏移,那么解所在的局部区域会发生较大的变化,这样的解是比较糟糕的解。

我们提出的方法只是线性问题、非线性问题求解的一个小步骤,计算复杂度可以忽略。实验结果表明该方法能够改善环境退化下的位姿解估计结果。
这种方法有点类似可观测子空间、可控子空间的概念。
每次求解时
- 优化解=原始解在非退化方向投影+估计值在退化方向投影(
实际算法中可以将退化方向解丢弃,只考虑非退化方向)
考虑方程
min
x
f
2
(
x
)
(1)
\tag{1}\underset{x}{\min}{f^2(x)}
xminf2(x)(1)
那么
(
1
)
(1)
(1)为线性方程时可以直接使用奇异值分解SVD、QR分解求解,但是
(
1
)
(1)
(1)为非线性方程时需要进行局部微分转换为求解线性方程,因此线性、非线性问题都可以转换为下面的形式
a
r
g
min
x
∣
∣
A
x
−
b
∣
∣
2
(2)
\tag{2}arg\underset{x}{\min}{||Ax-b||^2}
argxmin∣∣Ax−b∣∣2(2)
我们的方法将(2)中的每一行看作
x
x
x空间中的一个(超)平面,这些平面约束着
x
x
x(通过方向
A
A
A和位置
b
b
b共同约束得到
x
x
x的解),并研究平面的几何分布来确定退化方向。
做出两个假设:
- 假设在考虑传感器噪声的情况下对矩阵A进行了适当的
加权。也就是 ( 1 ) (1) (1)问题的线性加权形式 - 原始问题
不受约束,并且在问题非退化时,解由真正的传感器测量值决定。
第一个问题:给定线性化系统
(
2
)
(2)
(2),确定状态空间中时候存在退化并确定相应的退化方向。在退化的情况下,防止在退化方向上出现错误解。
假设
(
3
)
(3)
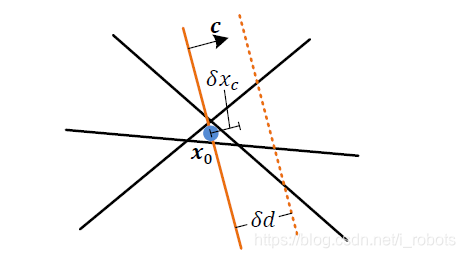
(3)的原始解为
x
0
x_0
x0,一开始加入经过
x
0
x_0
x0的任意方向扰动
c
c
c,解并不发生变化

如果扰动
c
c
c相对于
x
0
x_0
x0偏离
δ
d
\delta{d}
δd,那么原始解
x
0
x_0
x0也会偏离
δ
x
c
\delta{x_c}
δxc,因为这个时候的约束区域已经发生了改变。由于扰动
c
c
c的方向任意,因此存在一个原始解的最大偏移,
δ
x
c
∗
=
max
c
x
c
\delta{x_c}^*=\underset{c}{\max}{x_c}
δxc∗=cmaxxc
定义1:退化因子
D
D
D
D
=
δ
d
δ
x
c
∗
(3)
\tag{3}D=\frac{\delta{d}}{\delta{x_c}^*}
D=δxc∗δd(3)
现在看一下
D
D
D的含义,也就是
-
δ
d
\delta{d}
δd的扰动导致的影响
δ
x
c
\delta{x_c}
δxc解的
偏移量最大,那么这个方向的解最不稳定,因此称这个方向为退化方向。
后面实际应用中会使用阈值来判断退化方向,只有满足一定条件才属于真正的退化方向,解在这个方向的分量并不可靠,因此需要去除或者调整解的这一部分分量。
根据推导可以得出两个结论,具体的推导可以查看原始论文,这里就不再详细推导了。
- 对于线性化系统,退化因子
D
D
D是
A
A
A的函数,与
b
b
b无关。
这说明退化方向只与原始的约束方向A A A有关,与原始约束的位置b b b无关。这和前面的推测一致,当原始约束方向平行的时候,就会引入退化。 - 对于线性化系统,退化因子
D
D
D的求解为
D
=
λ
m
i
n
+
1
D=\lambda_{min}+1
D=λmin+1,其中
λ
m
i
n
\lambda_{min}
λmin是
A
T
A
A^TA
ATA的最小特征值。
这说明A T A A^TA ATA的特征值和特征向量分别决定了是否存在退化以及退化的方向,对于 λ m i n = λ 1 \lambda_{min}=\lambda_1 λmin=λ1,它的退化方向就是 A T A A^TA ATA对应于 λ m i n \lambda_{min} λmin的特征向量 v m i n = v 1 v_{min}=v_1 vmin=v1
系统退化与否和系统是否存在解没有必然联系,即使系统出现退化,系统也是可能存在解的,因此需要将系统的解进行调整,一个策略就是将解进行投影,对于退化方向,使用优化的状态估计值,对于非退化方向,依然使用方程的解。另一个策略就是直接抛弃解在退化方向的分量。
因此有下面的表达式。
v
1
,
.
.
.
,
v
m
v_1,...,v_m
v1,...,vm对应的特征值小于阈值,因此被视为退化的方向向量。
v
m
+
1
,
.
.
.
,
v
n
v_m+1,...,v_n
vm+1,...,vn对应的特征值大于阈值,因此被视为非退化方向向量。
V
p
=
[
v
1
,
.
.
.
,
v
m
,
0
,
.
.
.
,
0
]
T
V_p=[v_1,...,v_m,0,...,0]^T
Vp=[v1,...,vm,0,...,0]T
V
u
=
[
0
,
.
.
.
,
0
,
v
m
+
1
,
.
.
.
,
v
n
]
T
V_u=[0,...,0,v_m+1,...,v_n]^T
Vu=[0,...,0,vm+1,...,vn]T
V
f
=
[
v
1
,
.
.
.
,
v
m
,
v
m
+
1
,
.
.
.
,
v
n
]
T
(4)
\tag{4}V_f=[v_1,...,v_m,v_m+1,...,v_n]^T
Vf=[v1,...,vm,vm+1,...,vn]T(4)
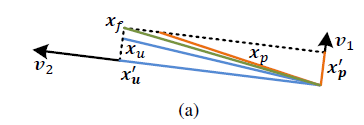
对应的重投影解为,其中
x
p
x_p
xp为真实状态的最优预测解,
x
u
x_u
xu为非线性优化得到的更新解。
x
f
=
x
p
′
+
x
u
′
x_f=x_p'+x_u'
xf=xp′+xu′
x
u
′
=
V
f
−
1
V
u
x
u
x_u'=V_f^{-1}V_ux_u
xu′=Vf−1Vuxu
x
p
′
=
V
f
−
1
V
p
x
p
(5)
\tag{5}x_p'=V_f^{-1}V_px_p
xp′=Vf−1Vpxp(5)
可以这样认为,先求出
V
p
x
p
V_px_p
Vpxp这是最优预测解在退化方向的分量,然后逆投影到
V
f
−
1
V_f^{-1}
Vf−1解空间中,可以认为
V
f
x
p
′
=
V
p
x
p
V_fx_p'=V_px_p
Vfxp′=Vpxp。后面的类似,就可以得到真正的优化解
x
f
x_f
xf
下图中蓝色表示非退化方向,橘色表示退化方向。
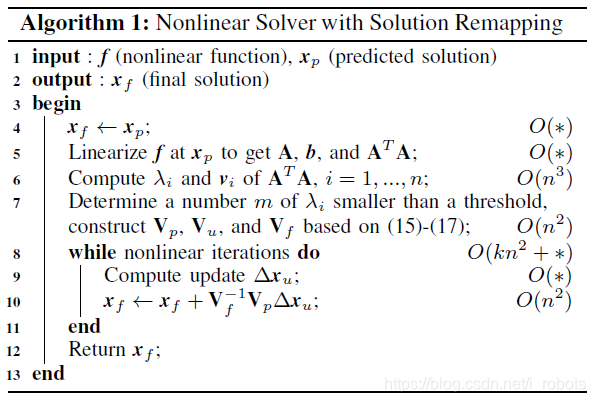
对于实际应用中,这里的应用指非线性求解,算法流程可以表示如下,对于退化方向,我们不考虑,直接丢弃,只考虑非退化方向解的增量。流程中第10行的公式有问题应该为
x
f
=
x
f
+
V
f
−
1
V
u
Δ
x
u
(6)
\tag{6}x_f=x_f+V_f^{-1}V_u\Delta{x_u}
xf=xf+Vf−1VuΔxu(6)
根据经验,只需要在运行开始计算一次
V
f
−
1
V
u
V_f^{-1}V_u
Vf−1Vu就行。
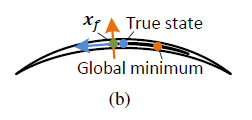
由于退化的存在,在估计问题中,全局最小的解(橘色)不一定等于真实位姿(蓝色),因此只在非退化方向上(橘色)进行更新,最终得到优化解
x
f
x_f
xf(绿色),比全局最小解(橘色)更加靠近真值。
3. 参考代码
这是在LOAM中一段代码,使用了该方法。
需要求解之前的公式
(
2
)
(2)
(2)
a
r
g
min
x
∣
∣
A
x
−
b
∣
∣
2
arg\underset{x}{\min}{||Ax-b||^2}
argxmin∣∣Ax−b∣∣2
if (iterCount == 0)只是迭代的最开始会进行退化分析float eignThre[6]判断是否退化的阈值数组matP = matV.inverse() * matV2的数学公式表示为 V f − 1 V u V_f^{-1}V_u Vf−1Vu-
V
f
V_f
Vf和
V
u
V_u
Vu中
行向量均为A T A A^TA ATA的特征向量.
这里发现了一点错误,原始代码中使用Opecv库计算特征向量,因此V中的每一行都是特征向量
/*Calculates eigenvalues and eigenvectors of a symmetric matrix.
bool cv::eigen ( InputArray src,
OutputArray eigenvalues,
OutputArray eigenvectors = noArray()
)
The function cv::eigen calculates just eigenvalues, or eigenvalues and eigenvectors of the symmetric matrix src:
src*eigenvectors.row(i).t() = eigenvalues.at<srcType>(i)*eigenvectors.row(i).t()*/
cv::eigen(matAtA, matE, matV);
而在Eigen中,matV的每一列都是特征向量.
/** \brief Returns the eigenvectors of given matrix.
*
* \returns A const reference to the matrix whose columns are the eigenvectors.
*
* \pre The eigenvectors have been computed before.
*
* */
matV = esolver.eigenvectors().real();
因此更正之后的代码如下,但是我运行时,更改前后没有太大区别,可以想一想为什么?哈哈.
Eigen::SelfAdjointEigenSolver< Eigen::Matrix<float, 6, 6> > esolver(matAtA);
matE = esolver.eigenvalues().real();
matV = esolver.eigenvectors().real();
//这里有点问题,matV中列向量是特征向量,因此需要转置.
// matV2 = matV;
matV2 = matV.transpose();
isDegenerate = false;
float eignThre[6] = { 10, 10, 10, 10, 10, 10 };
for (int i = 0; i < 6; i++)
{
if (matE(0, i) < eignThre[i])
{
std::cout<<"eigenThre"<<matE(0, i);
for (int j = 0; j < 6; j++)
{
matV2(i, j) = 0;
}
isDegenerate = true;
}
else
{
break;
}
}
// matP = matV.inverse() * matV2;
//需要进行转置
matP = matV.transpose().inverse() * matV2;
这是原始参考代码,有错误,上面已经指出了
matAt = matA.transpose();
matAtA = matAt * matA;
matAtB = matAt * matB;
matX = matAtA.colPivHouseholderQr().solve(matAtB);
if (iterCount == 0)
{
Eigen::Matrix<float, 1, 6> matE;
Eigen::Matrix<float, 6, 6> matV;
Eigen::Matrix<float, 6, 6> matV2;
Eigen::SelfAdjointEigenSolver< Eigen::Matrix<float, 6, 6> > esolver(matAtA);
matE = esolver.eigenvalues().real();
matV = esolver.eigenvectors().real();
matV2 = matV;
isDegenerate = false;
float eignThre[6] = { 100, 100, 100, 100, 100, 100 };
for (int i = 0; i < 6; i++)
{
if (matE(0, i) < eignThre[i])
{
for (int j = 0; j < 6; j++)
{
matV2(i, j) = 0;
}
isDegenerate = true;
}
else
{
break;
}
}
matP = matV.inverse() * matV2;
}
if (isDegenerate)
{
Eigen::Matrix<float, 6, 1> matX2(matX);
matX = matP * matX2;
}
4. 参考链接
- Zhang J , Kaess M , Singh S . On degeneracy of optimization-based state estimation problems.[C]// 2016 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2016.
免费原始链接On_degeneracy_of_optimization-based_state_estimation_problems
优快云1积分链接,带备注优快云_On_degeneracy_of_optimization-based_state_estimation_problems

















 206
206





 到【灌水乐园】发言
到【灌水乐园】发言







