




 博客围绕图形SDK展开,从运行旋转三角形开始,对代码进行分析。涉及顶点数组、索引数组等内容,探讨创建、清理、动画等功能。调试时查看命令行、配置结构体,还发现有OpenGL、Vulkan等API及多种摄像机运动模式,最后准备查看各个类。
博客围绕图形SDK展开,从运行旋转三角形开始,对代码进行分析。涉及顶点数组、索引数组等内容,探讨创建、清理、动画等功能。调试时查看命令行、配置结构体,还发现有OpenGL、Vulkan等API及多种摄像机运动模式,最后准备查看各个类。
图形sdk,一般是从三角形开始的,先运行下。
还好,能过。要不白费劲了。是一个旋转的三角形。
看看代码,先折叠下,猜测大概有啥东西。如果我写,该怎么写。
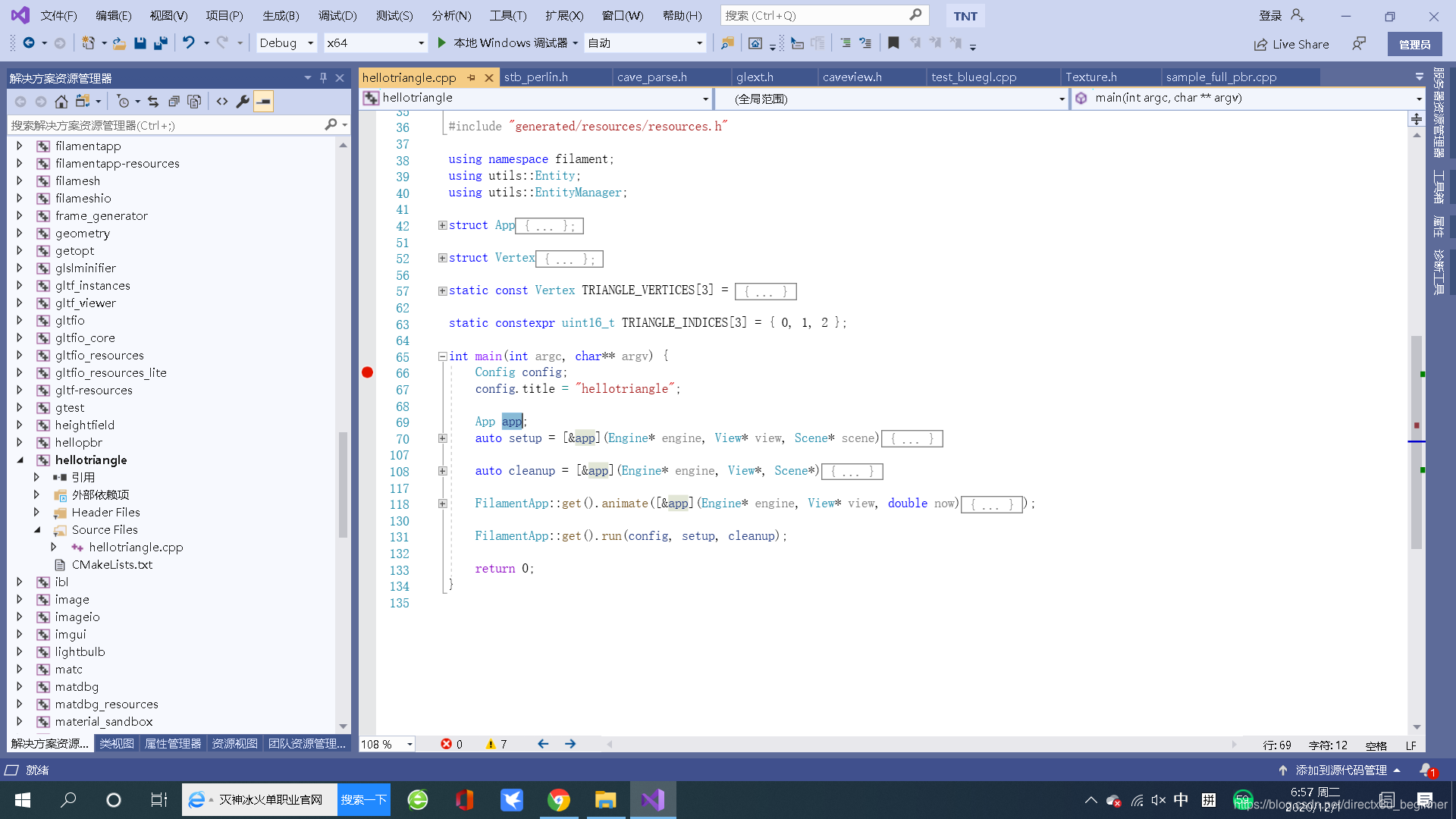
顶点数组,索引数组,应用,创建,清理,动画,运行,配置
顶点数组和索引是传到三角形的。创建和清理是正常的入口和出口,动画应该是三角形旋转,运行是从读取配置到启动到清理结束。setup是初始化,App是什么,不知道,
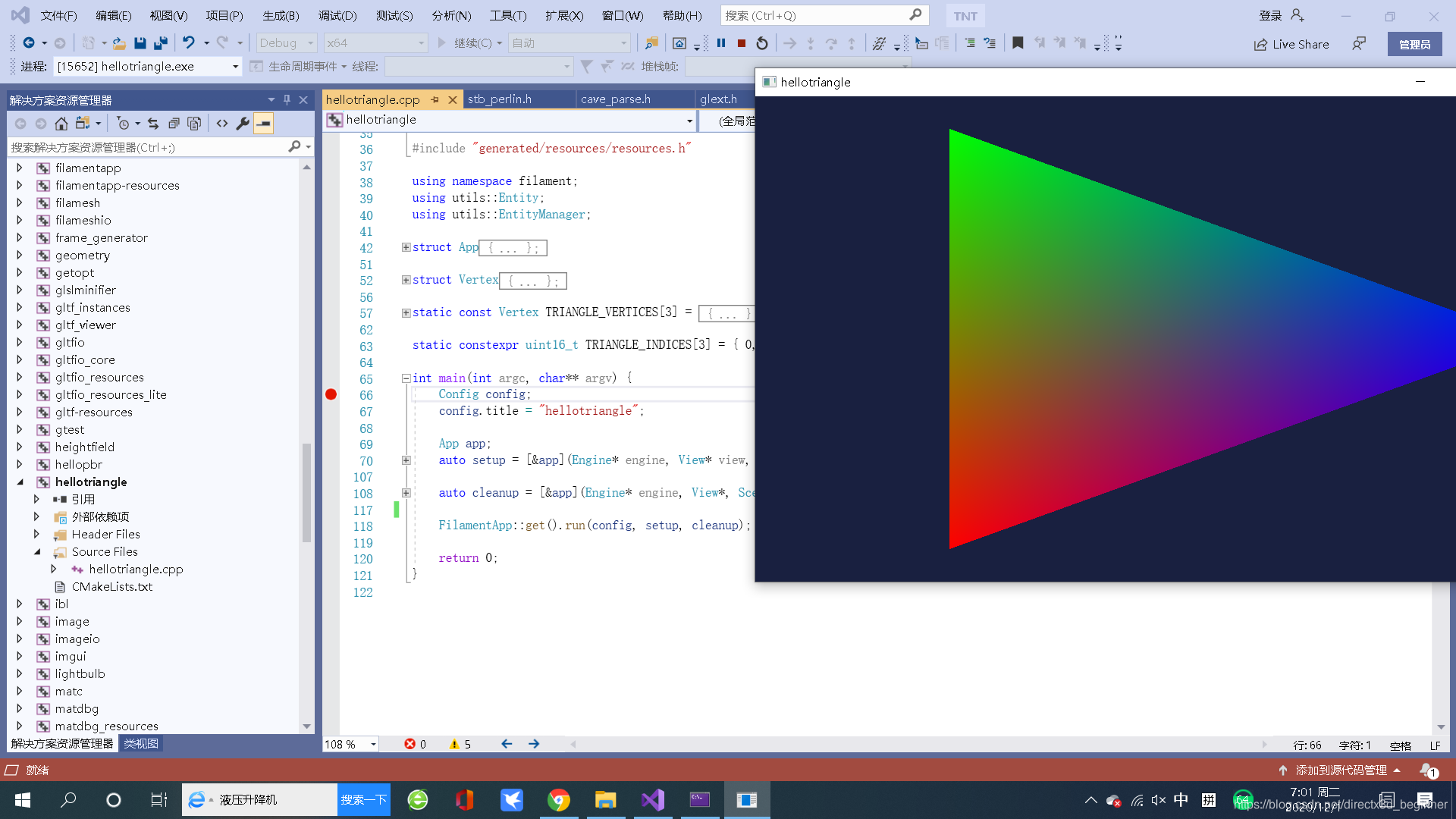
如果简略些,只考虑运行,不考虑旋转,动画可以删掉。果然如此,三角形不动了。
开始调试,先到sdl_window_main.c的main函数,读取命令行

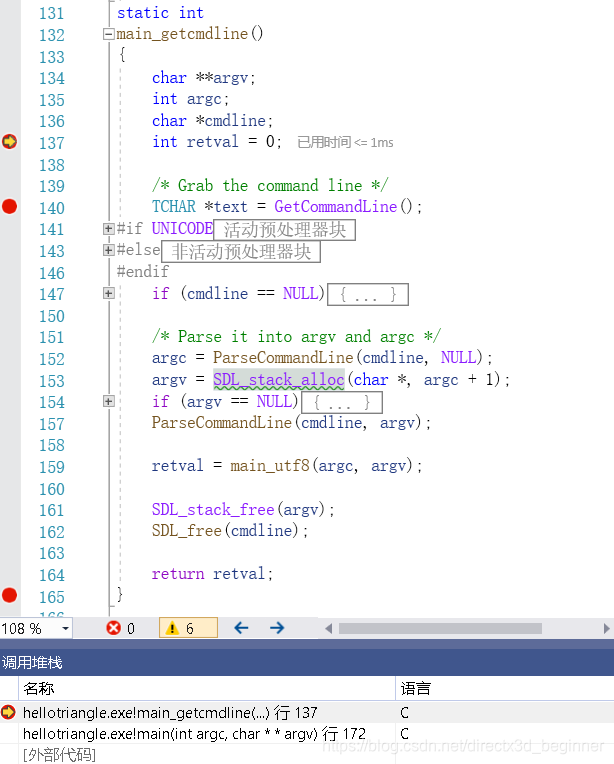
看看命令行是什么,当前进程。
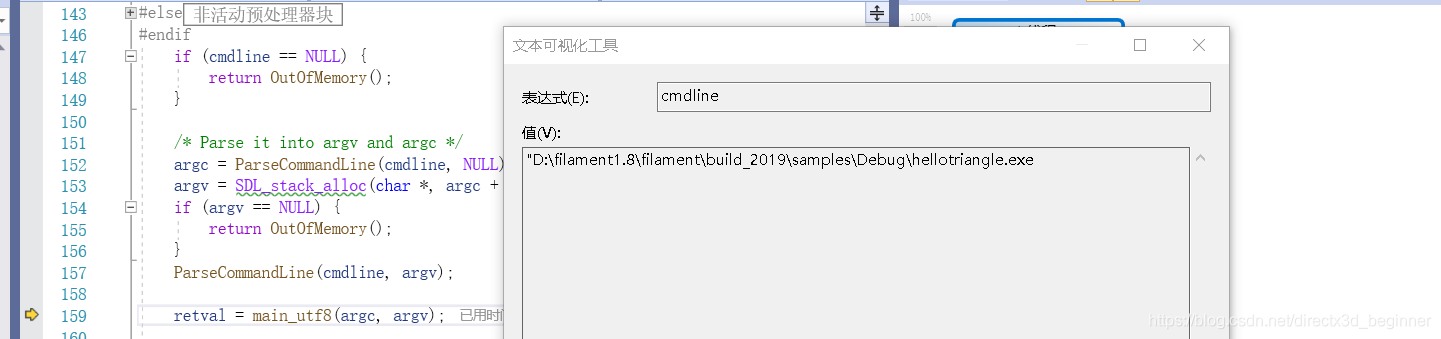
传到sdl
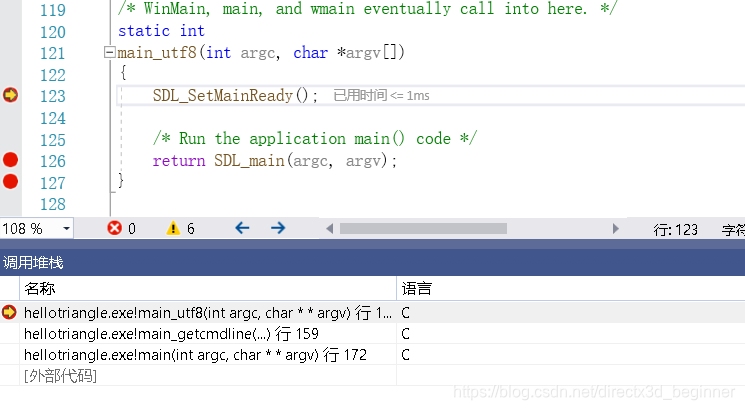
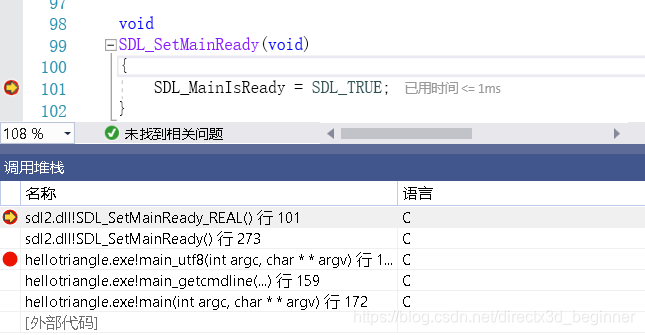
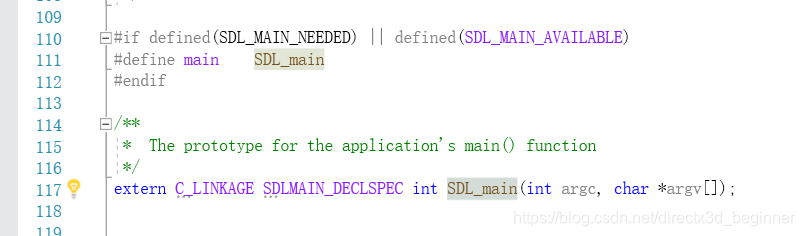
转到习惯的main()函数
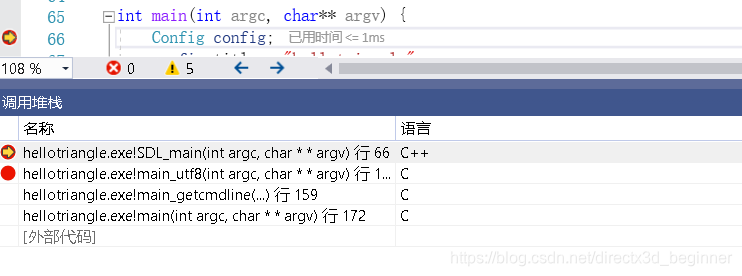
配置结构体,
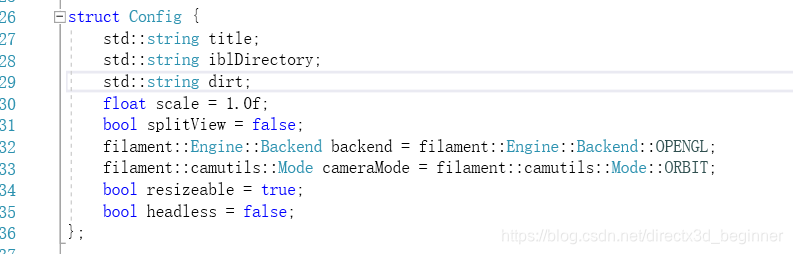
猜测估计是题目,目录名,放缩,是否分屏,用的opengl,摄像机用orbit,可放缩。
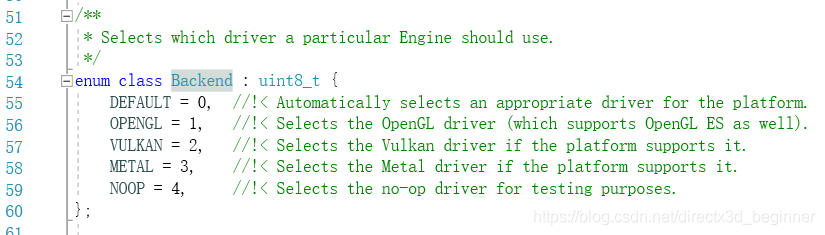
可以看到,原来有opengl,vulkan,meta几种api

几种摄像机运动模式.
该到看app的时候了,
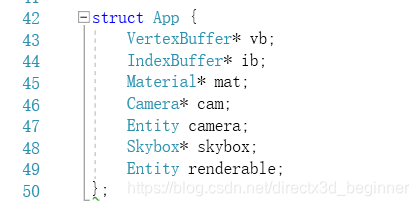
应该是顶点缓冲区,索引缓冲区,材质,摄像机,天空,实体(实体????什么东东)
代码下了无秘密。
分别看下各个类

















 2541
2541

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









