




 本文详细描述了在Ubuntu20.04上按照官方文档安装ROS2时遇到的locale设置问题和源文件尺寸不符的解决过程,包括设置UTF-8编码、调整源列表以及处理权限问题。
本文详细描述了在Ubuntu20.04上按照官方文档安装ROS2时遇到的locale设置问题和源文件尺寸不符的解决过程,包括设置UTF-8编码、调整源列表以及处理权限问题。
按照官方install步骤进行安装:
Ubuntu (Debian) — ROS 2 Documentation: Foxy documentation
参考别人的博客:
Ubuntu 20.04下的ROS2安装_ubuntu20.04安装ros2-优快云博客
有问题的再进行记录:
第一步:
locale # check for UTF-8
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # verify settings(建议还是一步一步的执行,这里发现有warning)
问题1:
![]()
解决方法:
又重新执行sudo locale-gen en_US en_US.UTF-8;
这一部执行前后的变化。
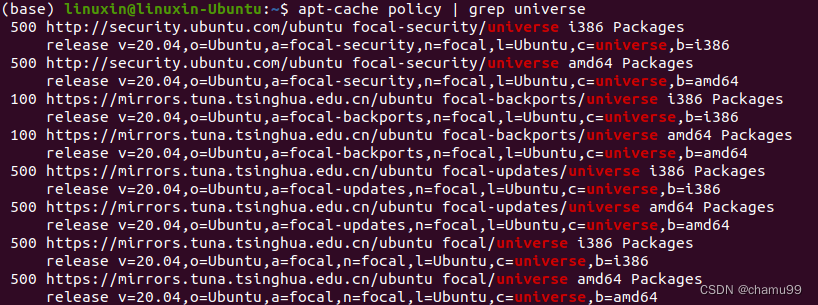
第二步:
因为提前换了源,所以检查的时候发现是正常的,就不用再安装相关的源了
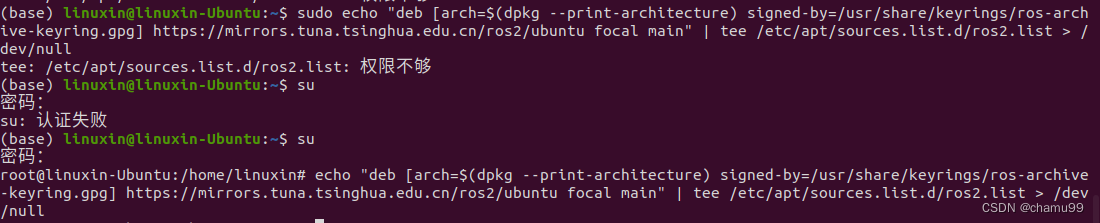
问题2:
执行sudo apt update又出现了文件尺寸不符的问题;
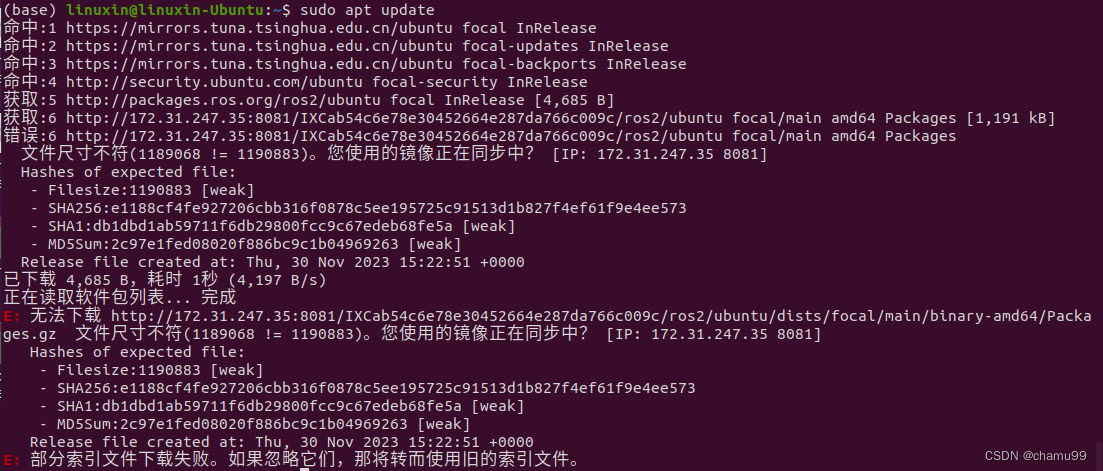
原因是因为前面还源了,将/etc/apt/sources.list中的源换成了清华源(Ubuntu更改镜像源参考),但是/etc/apt/sources.list.d/ros2.list中还是去ros官方源中找安装包,两个源可能不同步,造成有些安装包大小不一样,报错;
解决方法,将ros2.list中的源也更换成清华的,一条路走到黑;
换源的时候sudo权限也不够,只能切换到root用户;
这样子下载飞快,缺点可能就是不是最新的。

然后就安装好了。



















 3926
3926

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









