




一、数字滤波器概述
1、数字滤波器的概念
(1)数字滤波器(DF)作用是对输入信号进行滤波,换句话说,DF是由差分方程描述的一类特殊的离散时间系统。
(2)数字滤波器把输入序列通过一定的运算变换成输出序列,不同的运算处理方法决定了滤波器实现结构的不同。
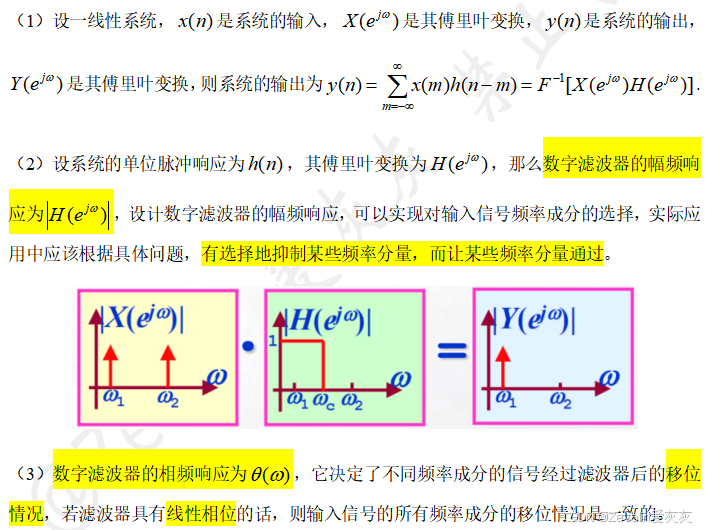
2、数字滤波器的工作原理
3、数字滤波器结构的表示方法
(1)数字滤波器表示所需的元素:
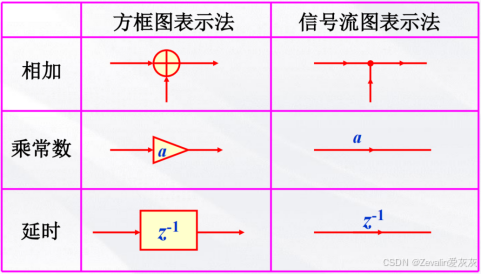
①表示方法:可选方框图表示法、信号流图表示法。
②运算类型:相加、乘以常数、延时。
③基本运算单元:加法器、乘法器、单位延时。
(2)可通过流图或方框图看出系统的运算步骤和运算结构,为方便起见,下面统一用流图分析数字滤波器的结构。
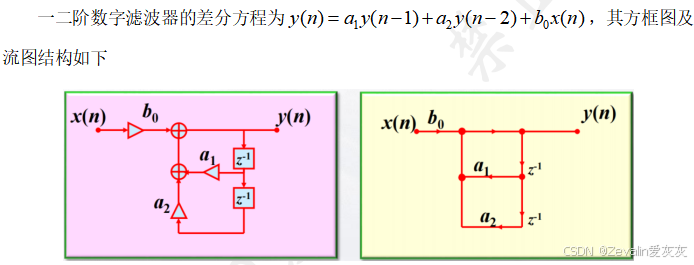
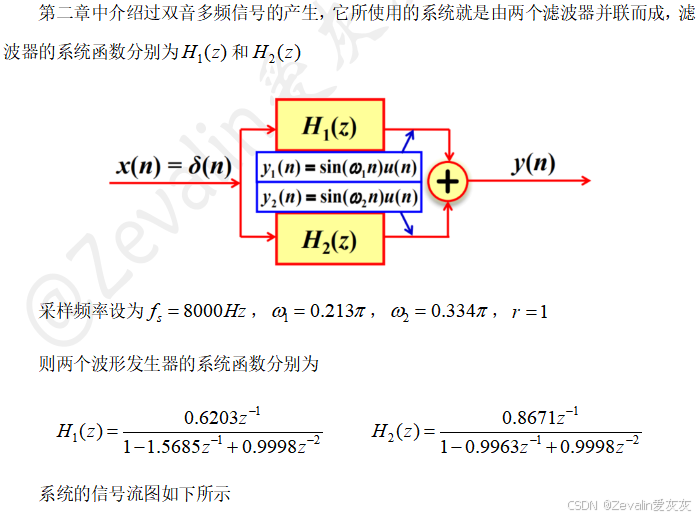
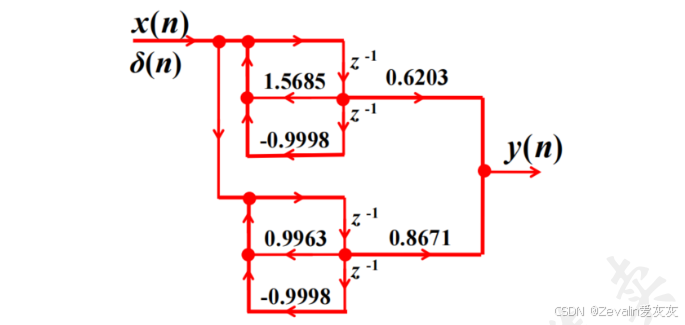
(3)举例:
4、研究数字滤波器结构的意义
(1)滤波器的基本特性(如有限长冲激响应FIR与无限长冲激响应IIR)决定了结构上有不同的特点。
(2)不同结构所需的存储单元及乘法次数不同,前者影响复杂性,后者影响运算速度。
(3)有限精度(有限字长)实现情况下,不同运算结构的误差及稳定性不同。
(4)好的滤波器结构应该易于控制滤波器性能,适合于模块化实现,便于时分复用。
二、IIR数字滤波器结构
1、直接I型及直接II型结构
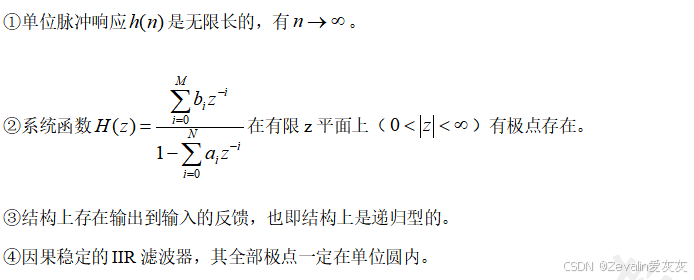
(1)IIR DF的特点:
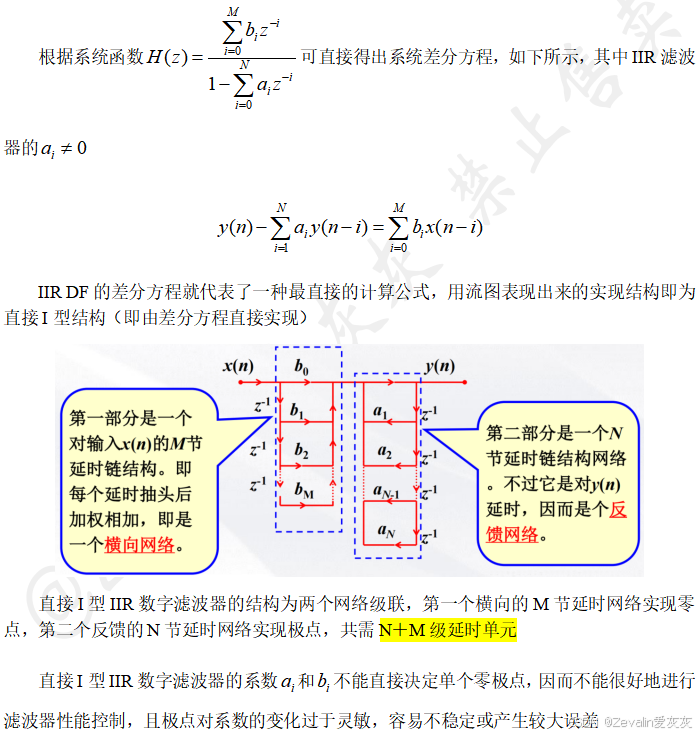
(2)直接I型IIR数字滤波器:
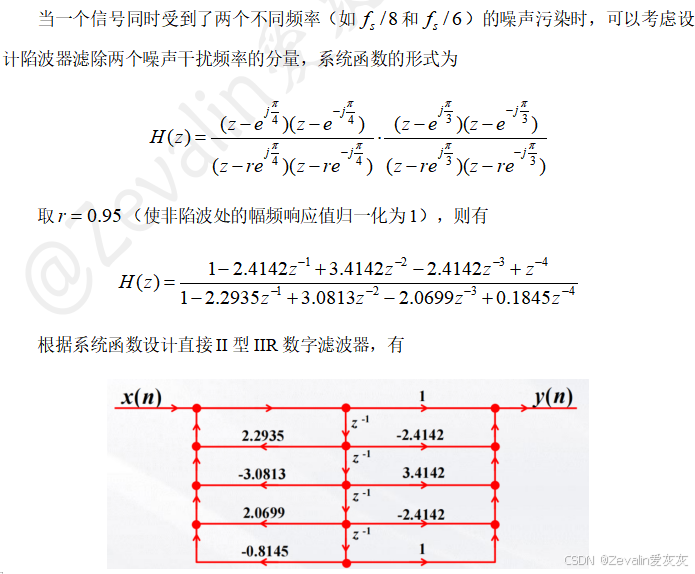
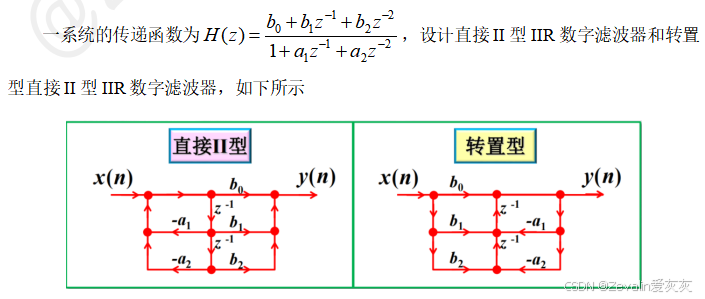
(3)直接II型IIR数字滤波器:
直接I型IIR数字滤波器使用了较多延时单元,编程时需要分配内存去存储它们,这无疑是增加了空间复杂度,对此可考虑将延时单元合并,这样就由直接I型IIR数字滤波器转化为直接II型IIR数字滤波器
直接II型IIR数字滤波器的结构为两个网络级联,第一个横向的M节延时网络实现零点,第二个反馈的N节延时网络实现极点,共需N(N≥M)级延时单元,所需延时单元数最少,又称为典范型
不过,直接II型IIR数字滤波器一样具有直接型实现的一般缺点
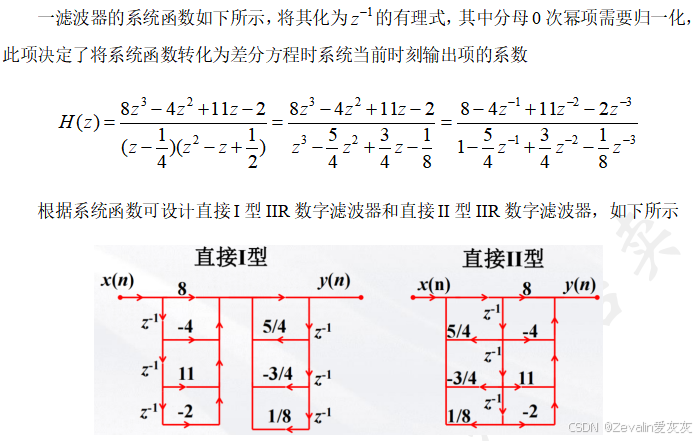
(4)举例:
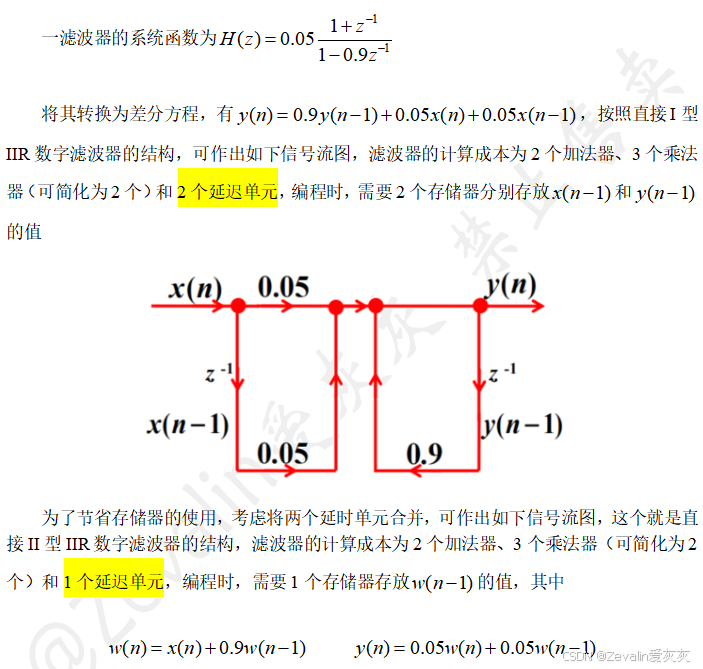
①例1:
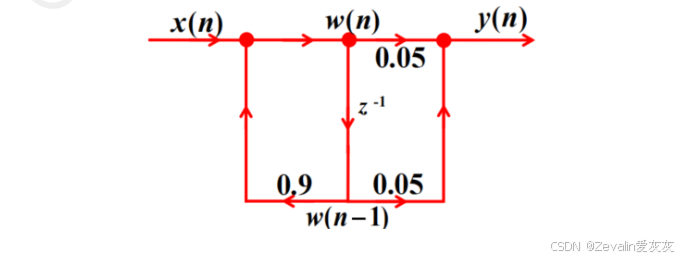
②例2:
2、级联型结构
(1)问题的引出与解决:
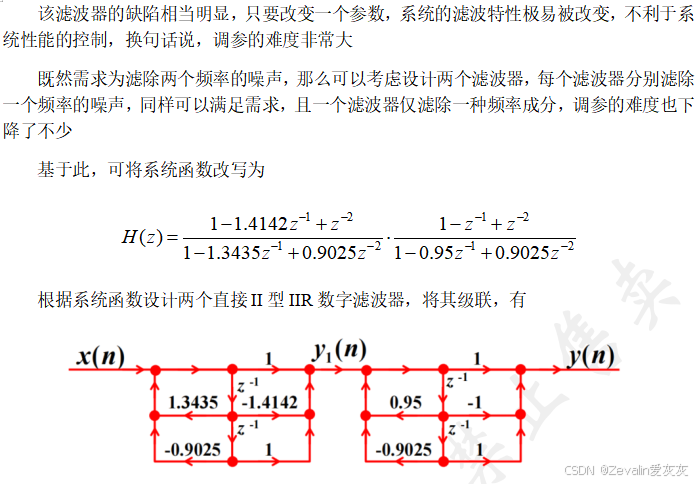
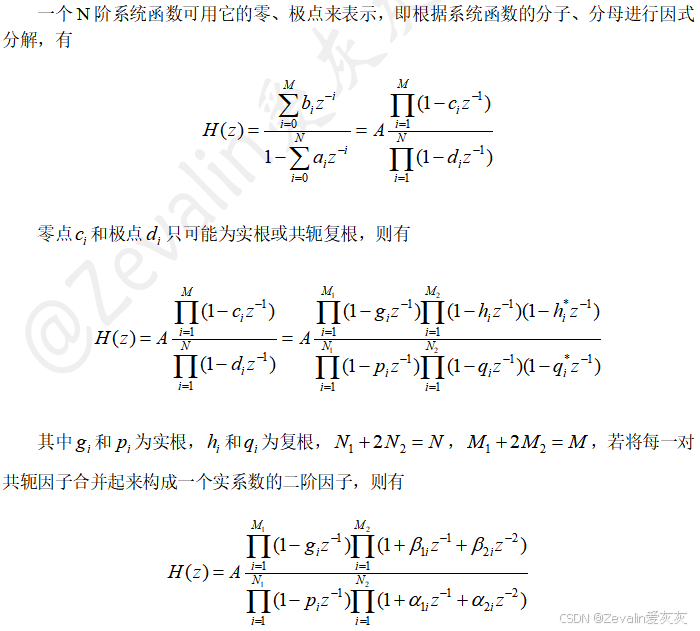
(2)级联型IIR数字滤波器系统函数的因式分解:
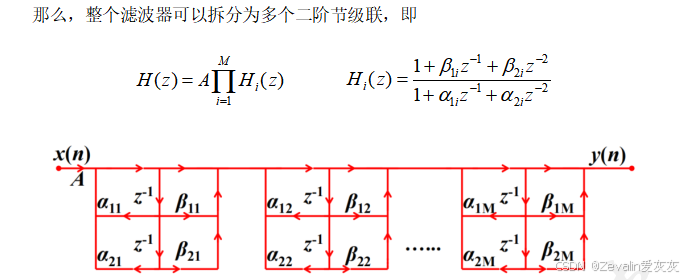
(3)级联型IIR数字滤波器结构的特点:
①每个二阶节系数单独控制一对零点或一对极点,有利于控制频率响应,滤波器调整方便。
②硬件实现中,可采用一个二阶环分时复用;软件实现中,可以调用同一子函数。
③对有限字长的敏感程度比直接型低。需要注意的是,不同的配对方式具有不同的有限字长敏感程度。
3、并联型结构
(1)问题的引出与解决:
(2)系统函数的部分分式展开:
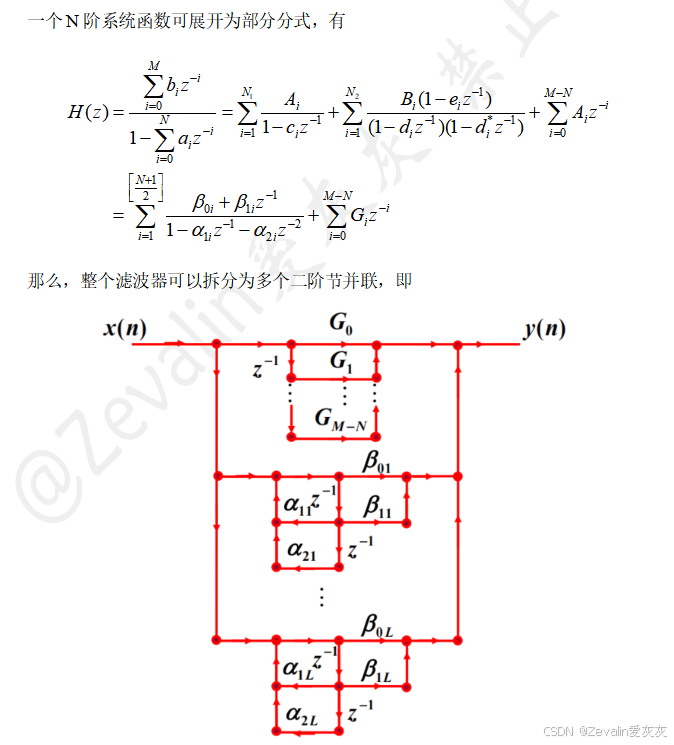
(3)并联型IIR数字滤波器结构的特点:
①可以单独调整极点位置,但不能像级联那样直接控制零点,故不能用于对零点位置精度要求高的滤波器,例如陷波器和窄带带阻滤波器。
②各基本网络是并联的,产生的运算误差互不影响,不像直接型和级联型有误差累积,故并联型结构的运算误差较小。
③硬件实现时,各子系统可以并行实现,运算速度快。
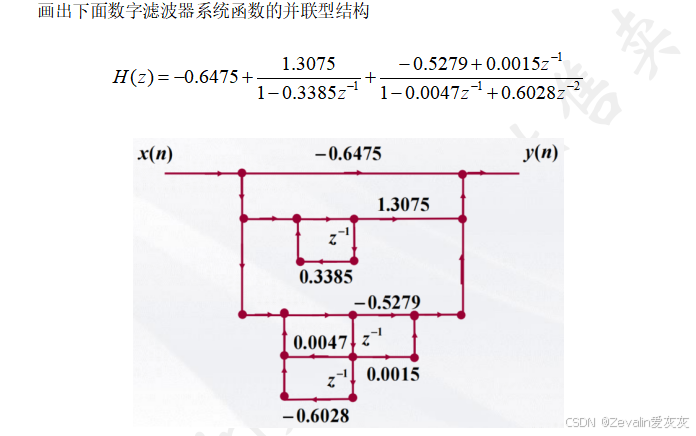
(4)举例:
4、转置型结构
(1)如果将一个实系数LSI系统的流图中的所有支路方向翻转,支路增益不变,将输入输出的位置交换,则形成原网络的转置型结构,且系统的传输函数不变。
(2)举例:
三、FIR数字滤波器结构
1、直接型结构
(1)FIR DF的特点:
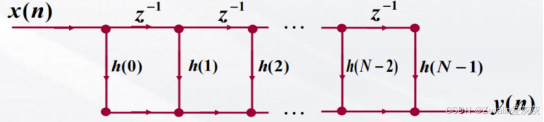
(2)根据FIR数字滤波器的系统函数可以推导出系统的差分方程为

(3)根据系统的差分方程可直接作出信号流图,这就是FIR数字滤波器直接型结构,它简单直观,运算速度快,但不能直接控制零点。
2、级联型结构
(1)当需要控制滤波器的传输零点时,可将FIR数字滤波器的系统函数分解成二阶实系数因子的形成,即

该式可由多个二阶节级联实现,如下所示
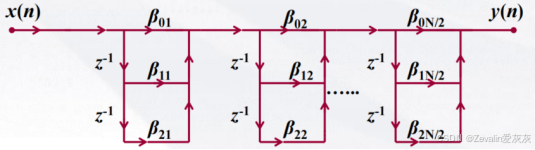
(2)级联型FIR数字滤波器结构的特点:
①级联型FIR数字滤波器结构所需的系数比直接型多,因而所需乘法运算比直接型多。
②级联型FIR数字滤波器结构的易于系统零点的控制,因而常在需要控制传输零点时使用。
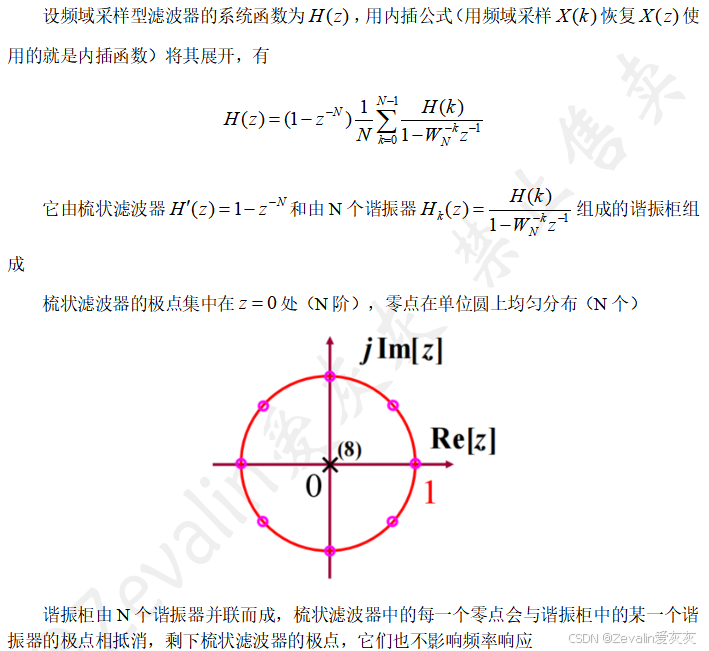
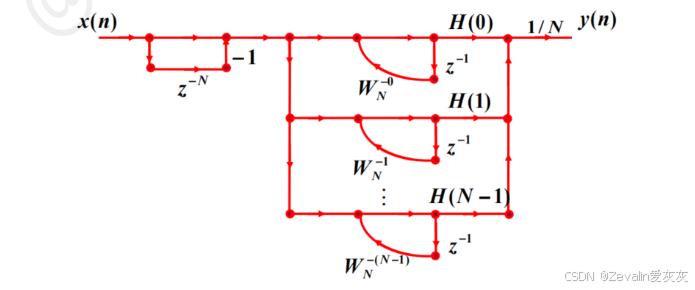
3、频域采样型结构
(1)频域采样型滤波器结构的基本原理:
(2)频域采样型FIR数字滤波器结构的特点:
①可直接根据系统的频率响应的采样值构造滤波器,易于设计实现。
②谐振器柜中的每个一阶网络的系数均为复数,计算相对复杂。
③适用于窄带滤波器,即仅有少数不为0的滤波器。
④由于系数响应字长的有限,系统容易变得不稳定。
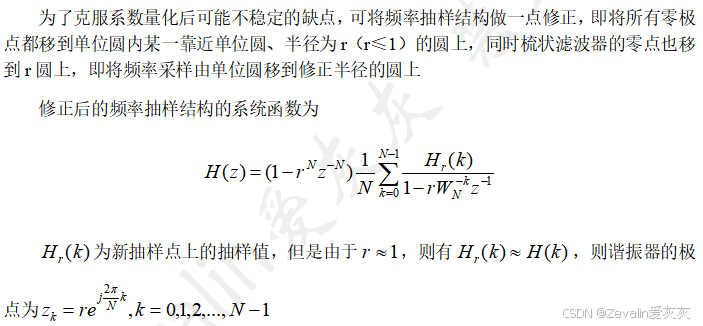
(3)频域采样型FIR数字滤波器的优化:
(4)频域采样型结构实现的说明:
①当谐振器柜中剩下少数几个所需要的谐振器时,该结构可以比直接型结构少用乘法器,但使用的存储器会多一些。
②可以共同使用多个并列的滤波器实现,在实现时,可以共用梳状滤波器及谐振柜,将各谐振器的输出适当加权组合就能组成各种所需的滤波器。
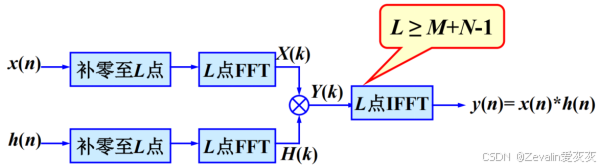
4、快速卷积型结构
(1)快速卷积型滤波器结构的基本原理:
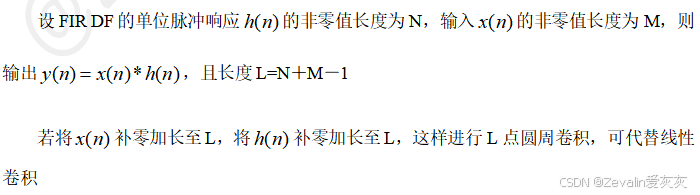
(2)快速卷积型滤波器的结构框图:
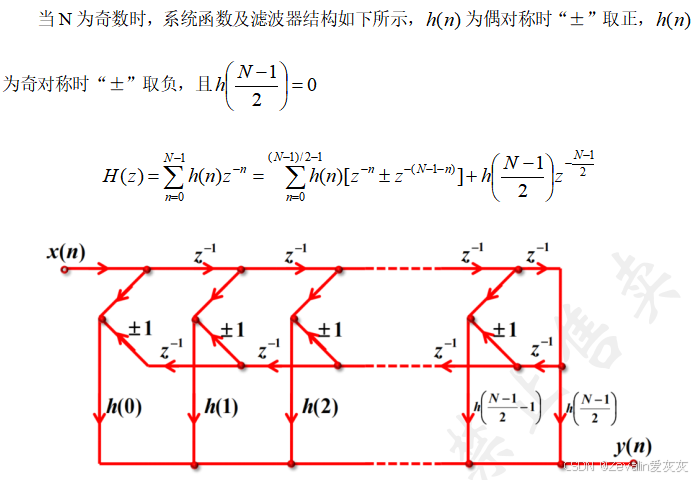
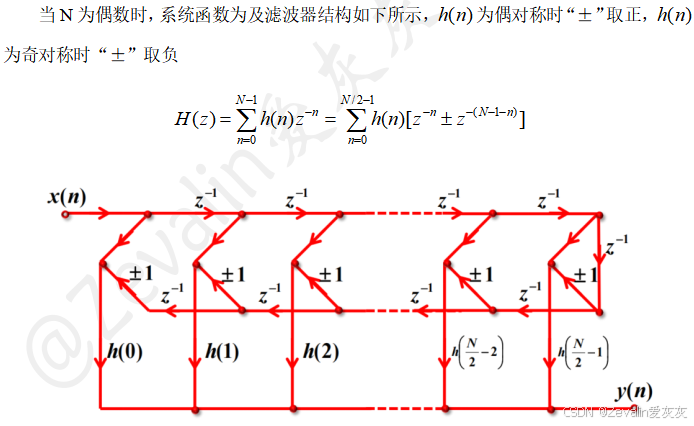
5、线性相位型结构
(1)线性相位系统与广义线性相位系统:
①线性相位系统:

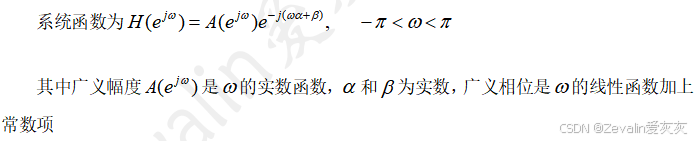
②广义线性相位系统:
③线性相位系统和广义线性相位系统统称为常数群延迟系统。
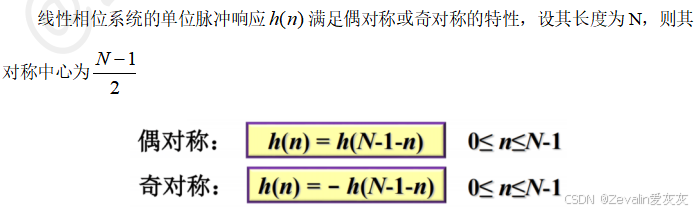
(2)线性相位系统单位脉冲响应的特点:
(3)基于线性相位系统单位脉冲响应的特点,可以进一步节省运算过程中使用的乘法器:


















 881
881

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











