




新终端,加载Gazebo环境
roslaunch turtlebot3_gazebo turtlebot3_world.launch新终端,加载导航仿真程序,其中地图map.yaml是上一章建立的环境地图
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/map.yaml遇到报错:
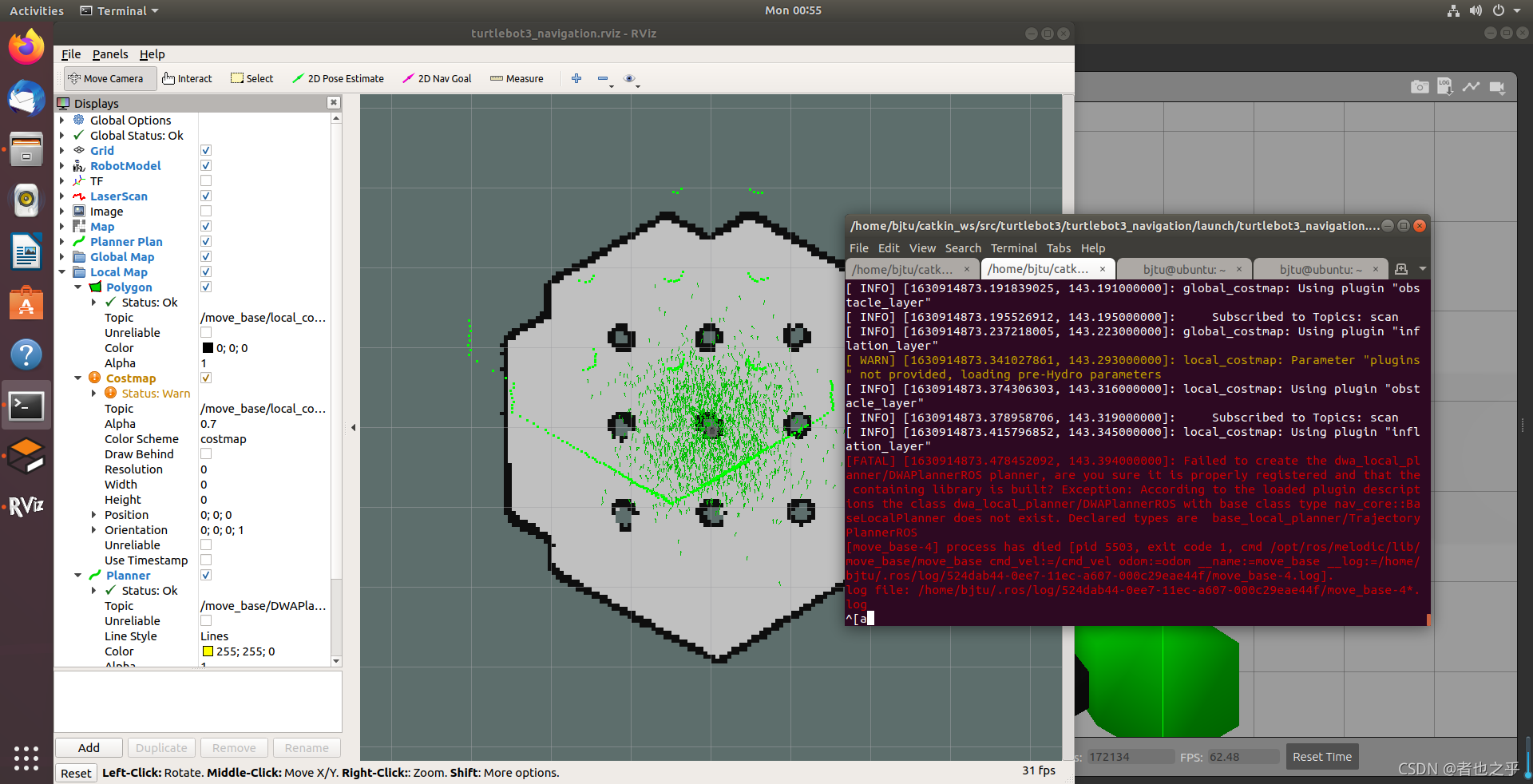
看提示是路径规划的包dwa_local_planner没有装,安装对应的包后重新运行导航launch文件:
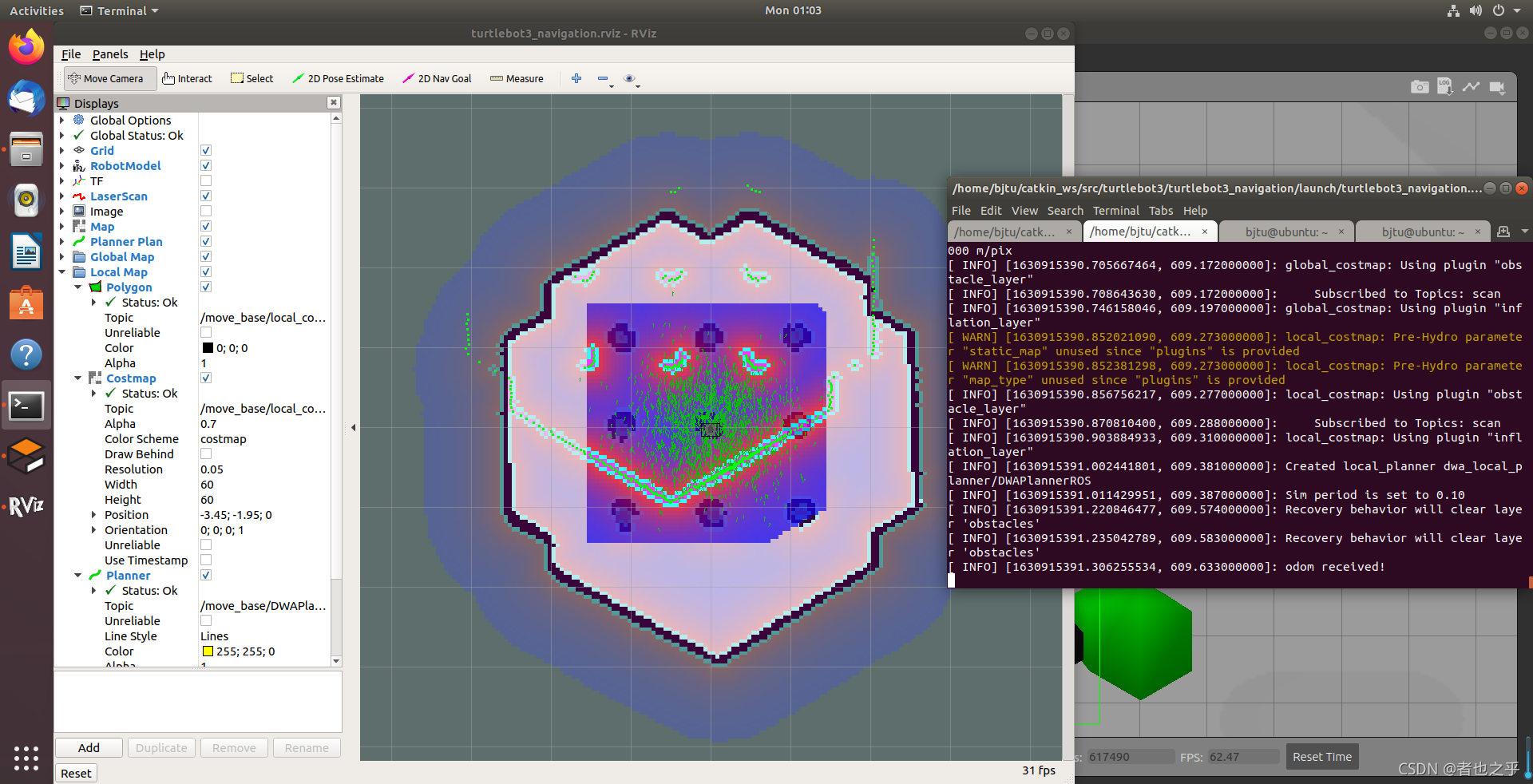
sudo apt-get install ros-melodic-dwa-local-planner
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/map.yaml运行结果显示正常:
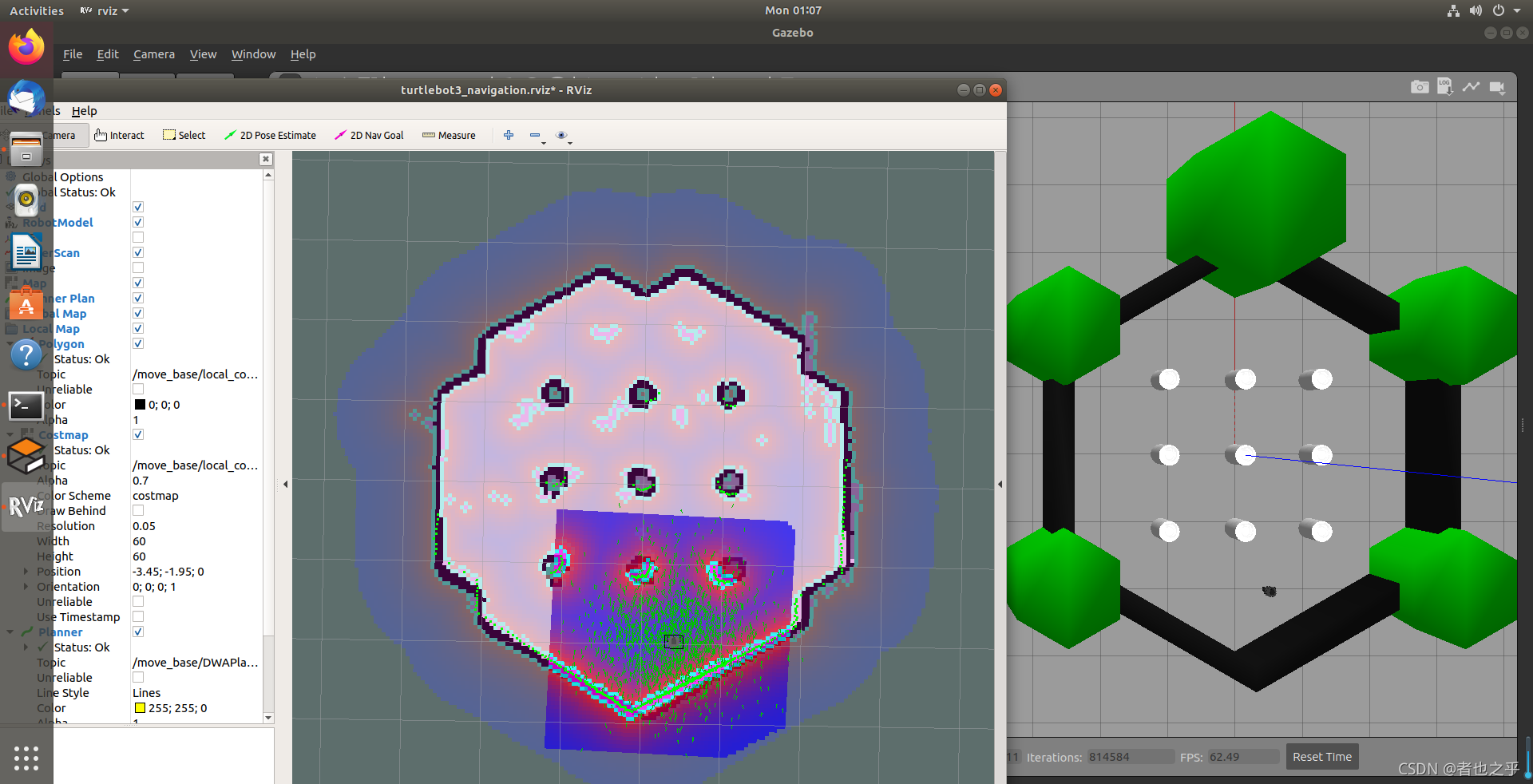
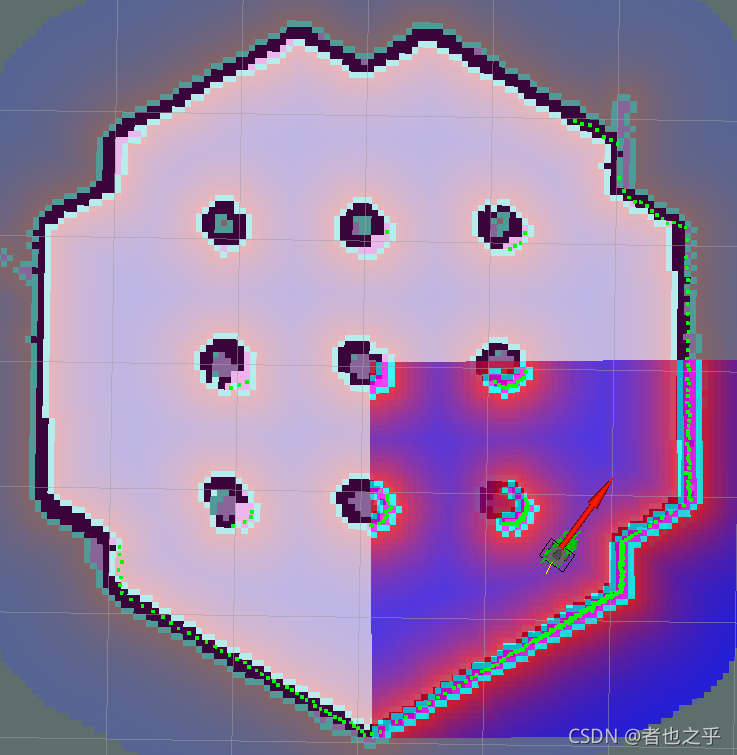
参照gazebo中的位置和方向,在RVIZ中用2D Pose Estimate调整rviz中小车的初始姿态,使雷达实时点云与地图尽可能重合。
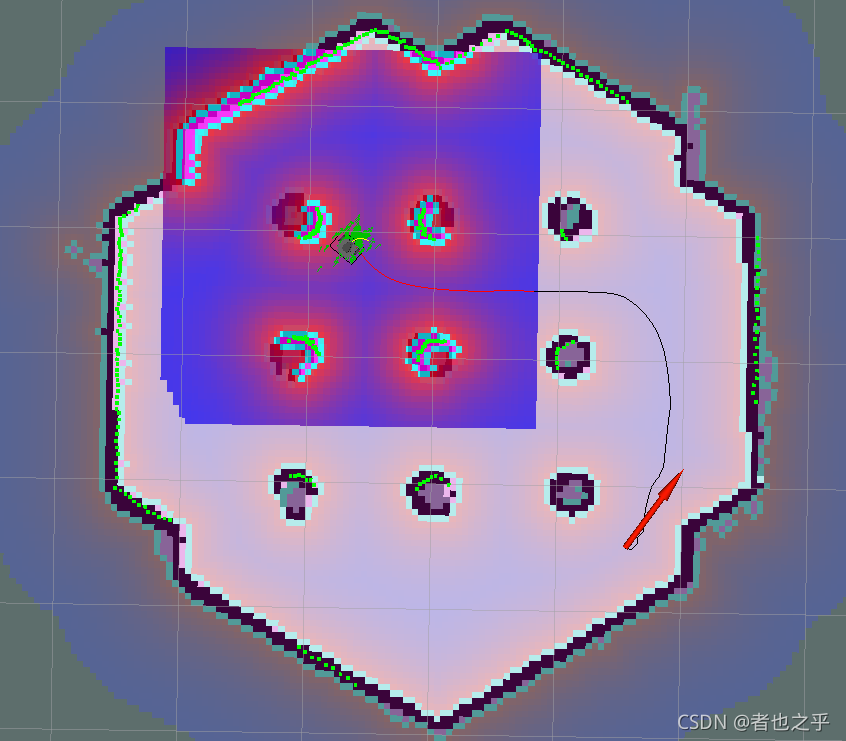
在RVIZ中用2D Nav Goal,指定目标位置,就可以观察到小车的导航全过程。

















 3012
3012

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









