




 本文介绍了ROS系统中几个关键节点的使用,包括roscore、地图数据发布、点云数据发布、AMCL定位算法和move_base路径规划。通过启动相关launch文件,如amcl.launch和move_base.launch,实现机器人的自主定位和导航。然而,在实际操作中遇到了AMCL未读取到地图信息以及坐标系偏差问题,需要进一步解决。
本文介绍了ROS系统中几个关键节点的使用,包括roscore、地图数据发布、点云数据发布、AMCL定位算法和move_base路径规划。通过启动相关launch文件,如amcl.launch和move_base.launch,实现机器人的自主定位和导航。然而,在实际操作中遇到了AMCL未读取到地图信息以及坐标系偏差问题,需要进一步解决。
一、roscore
用于整个系统ros系统的信息交互。
roscore二、地图数据发布节点
发布已经建立好的地图信息,给move_base节点使用,用于和实际的雷达数据匹配。
建立地图的教程参考本教程第五讲。
cd ~/catkin
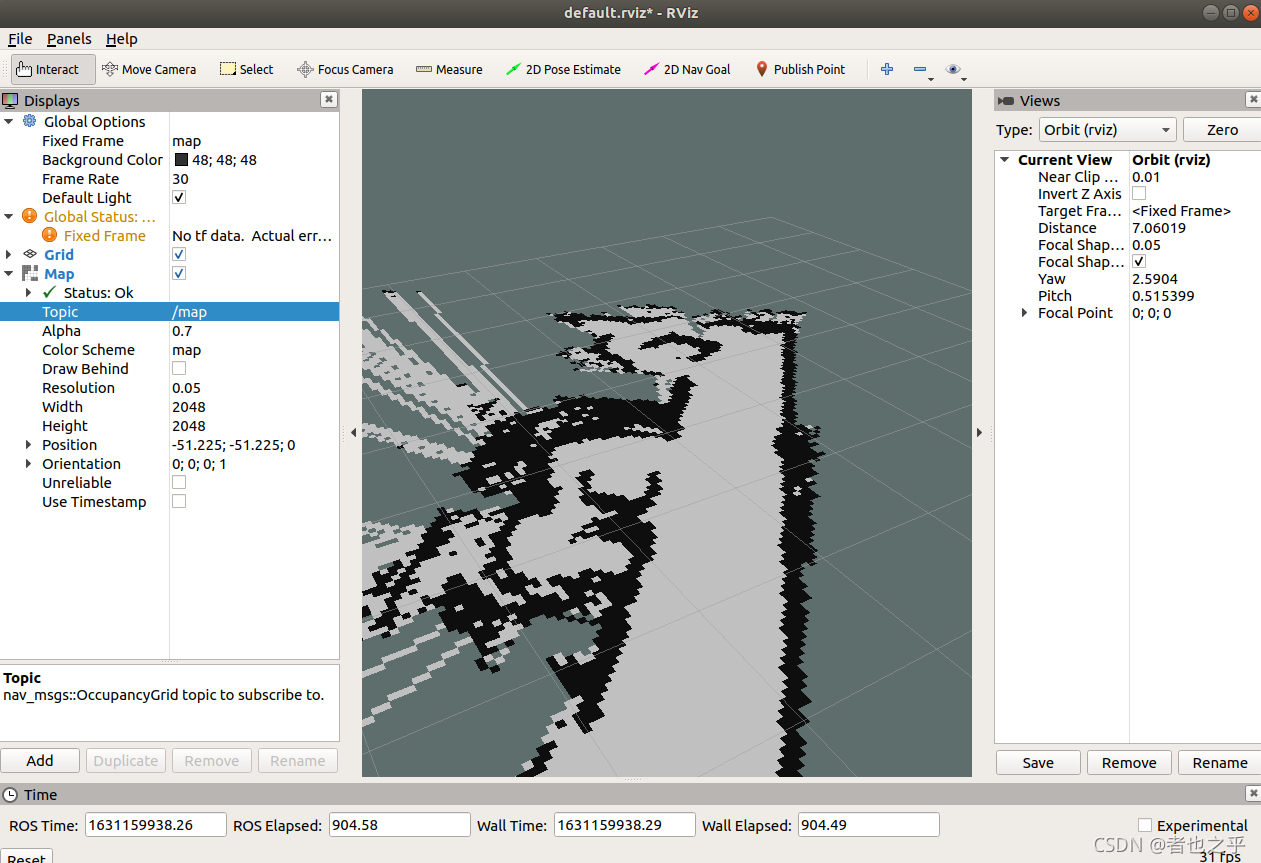
rosrun map_server map_server my_map_name.yaml在rviz中查看发布的地图信息。
三、点云数据发布节点
使用点云数据发布节点,可以采用录制好的bag包,也可以采用实时的雷达数据。因为手上用的是16线robesense,因此需要运行一个点云发布节点,同时运行一个3D转2D的节点。参考本系列第三讲和第四讲。
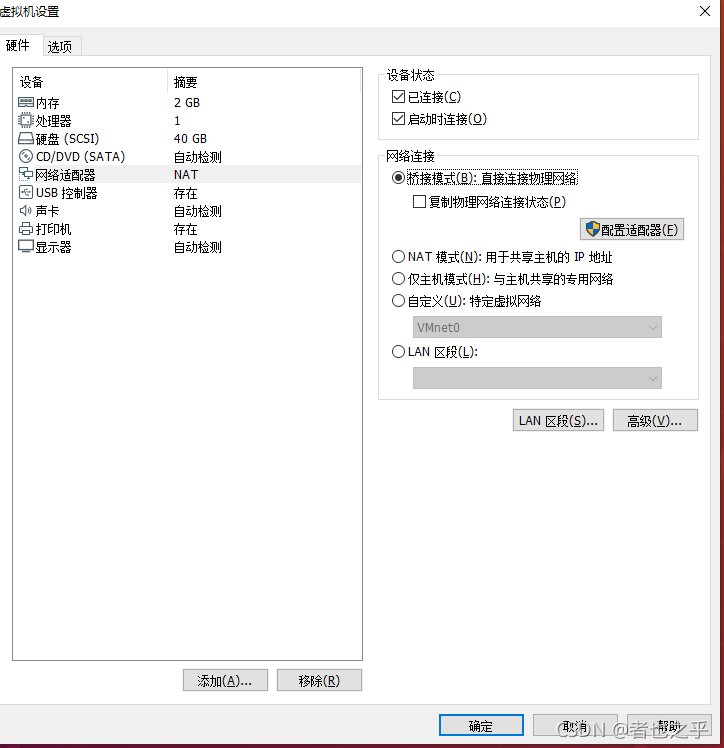
虚拟机设置网络采用桥接模式,修改IP固定。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 14万+
14万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









