




PCL专栏目录及须知-优快云博客
1.原理
将整体点云体素化为一个三维体素栅格,使用每个体素栅格的中心点近似代表该体素块。
(1)对点云按照输入的立方体进行体素化处理,将所有的点云点分布进一个一个的小体素块中。
(2)计算每个体素块的中心点(注意要区别于体素滤波计算质点)。
(3)所有计算出的体素块中心点组成组成新的点云点,合并得到最终结果。
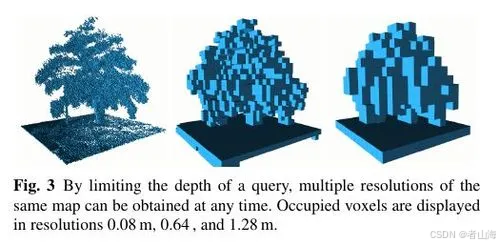
如何理解体素化:如下图,将整体点云体素化为多个小体素块,用一个个正方形的小块代表该范围内的点云。
2. 使用场景
用于海量点云的抽稀。
抽稀速度快(计算体素中心点,速度快于voxel_grid中的计算体素质心点)。
可以较好的保留点云的空间结构和形态特征。
3.注意事项
4.关键函数
(1)设置最小体素块的xyz(长宽高),点云即用该大小的体素块进行体素化。
setLeafSize() 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1448
1448

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









