









没学过SolidWorks的先去学习一下如何使用,推荐学习链接:SOLIDWORKS 教学 精品教程 | 2024年新修 | B站 点赞 播放 收藏 NO.1_哔哩哔哩_bilibili
学完之后,在SolidWorks中需要下载一个插件才能导出URDF文件。
插件下载
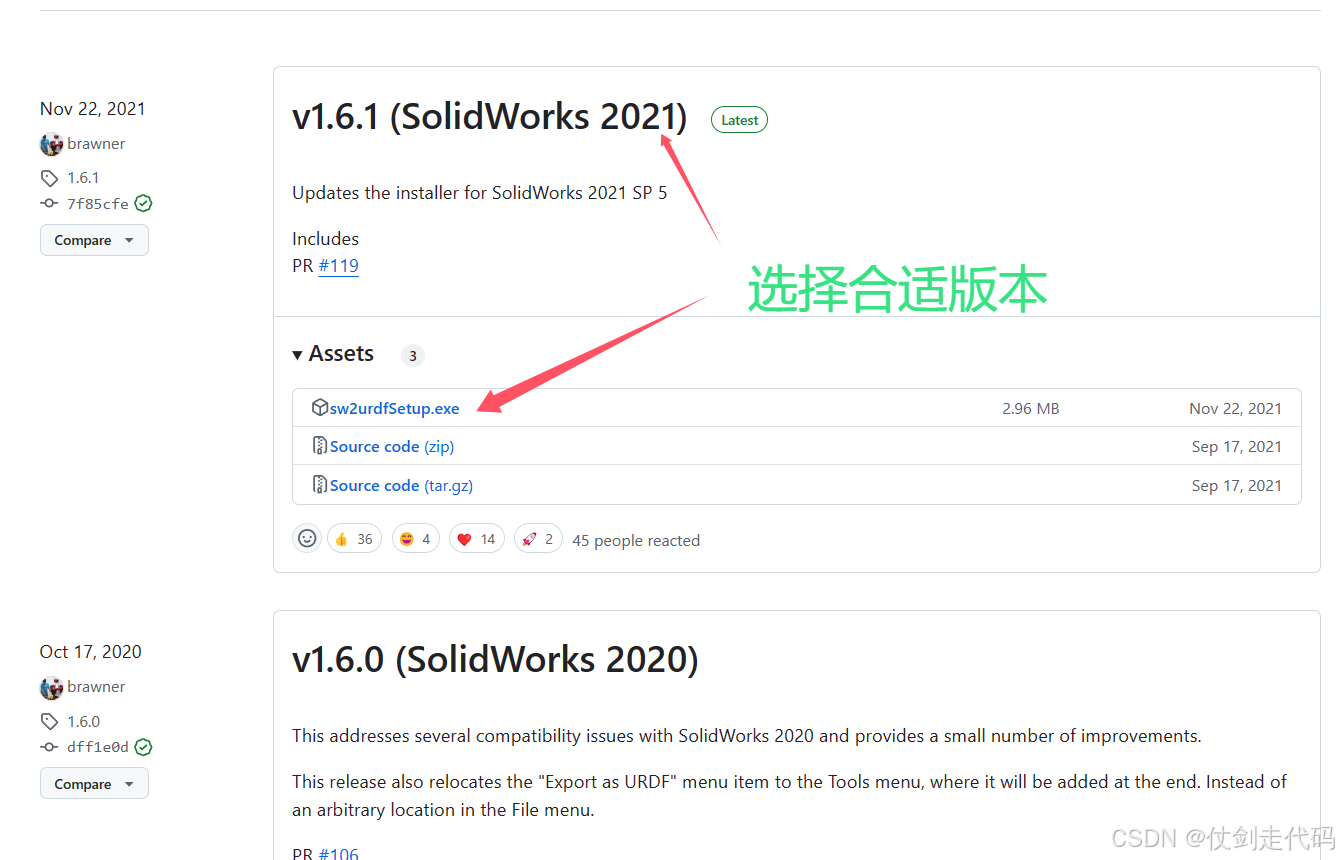
ROS目前提供了SolidWorks转URDF的插件,叫做sw_urdf_exporter,从wiki.ros.org/sw_urdf_exporter下载sw2urdfSetup.exe文件,下载后点击安装,安装完成后就能在solidworks中导出URDF模型了。
我这里用的SolidWorks2024,但是没有最新的插件,故选择2021的。
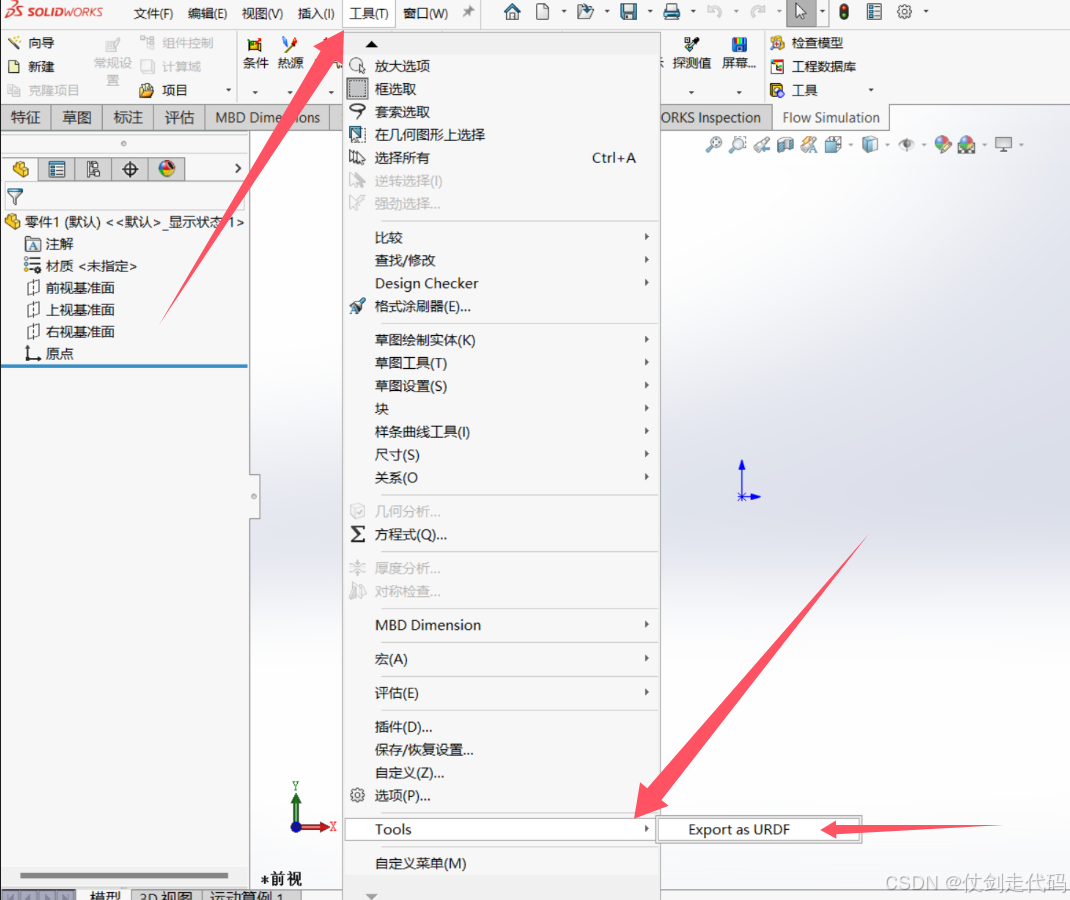
下载完成后重新打开SolidWorks,在工具tools中就可以看见插件了
建立配合
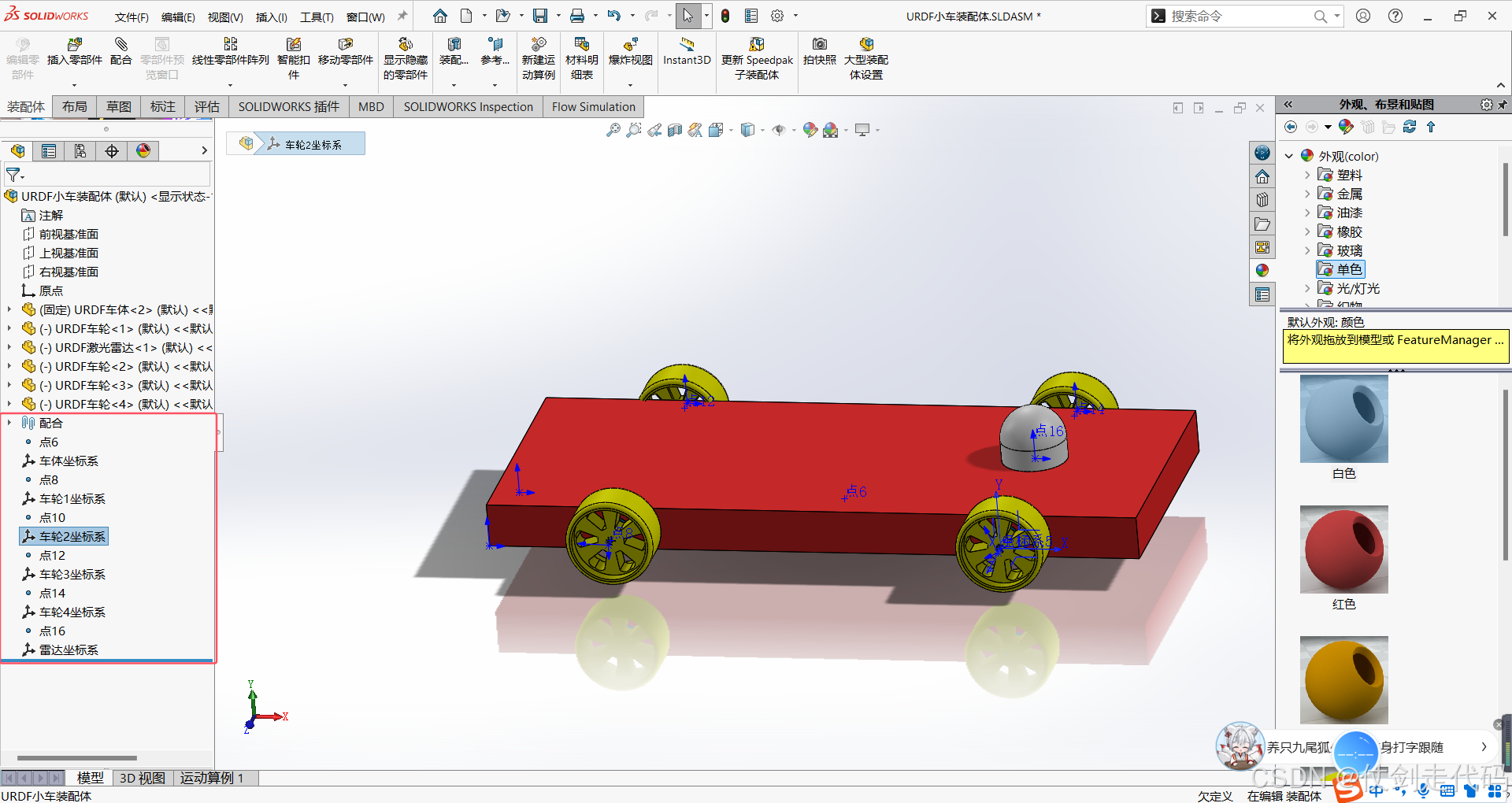
我简单制造了小车模型方便大家跟着学习,大家打开配套资源动手学习。
在车轮和车体之间建立重合和同心轴的配合,激光雷达和车体上表面建立配合。
建立配合
创建每一个link的点和坐标系
这个一定是要创建的, 依次点击 “装配体—参考几何体—点”,选择小车底盘,会在底盘中间生成一个点。
再依次点击“装配体—参考几何体—坐标系”,在底盘中间生成一个坐标系,选择坐标系方向与ROS中的坐标系方向相同。
为link创建坐标系
以相同方法为每个车轮创建点和坐标系,坐标系方向与ROS中一致。
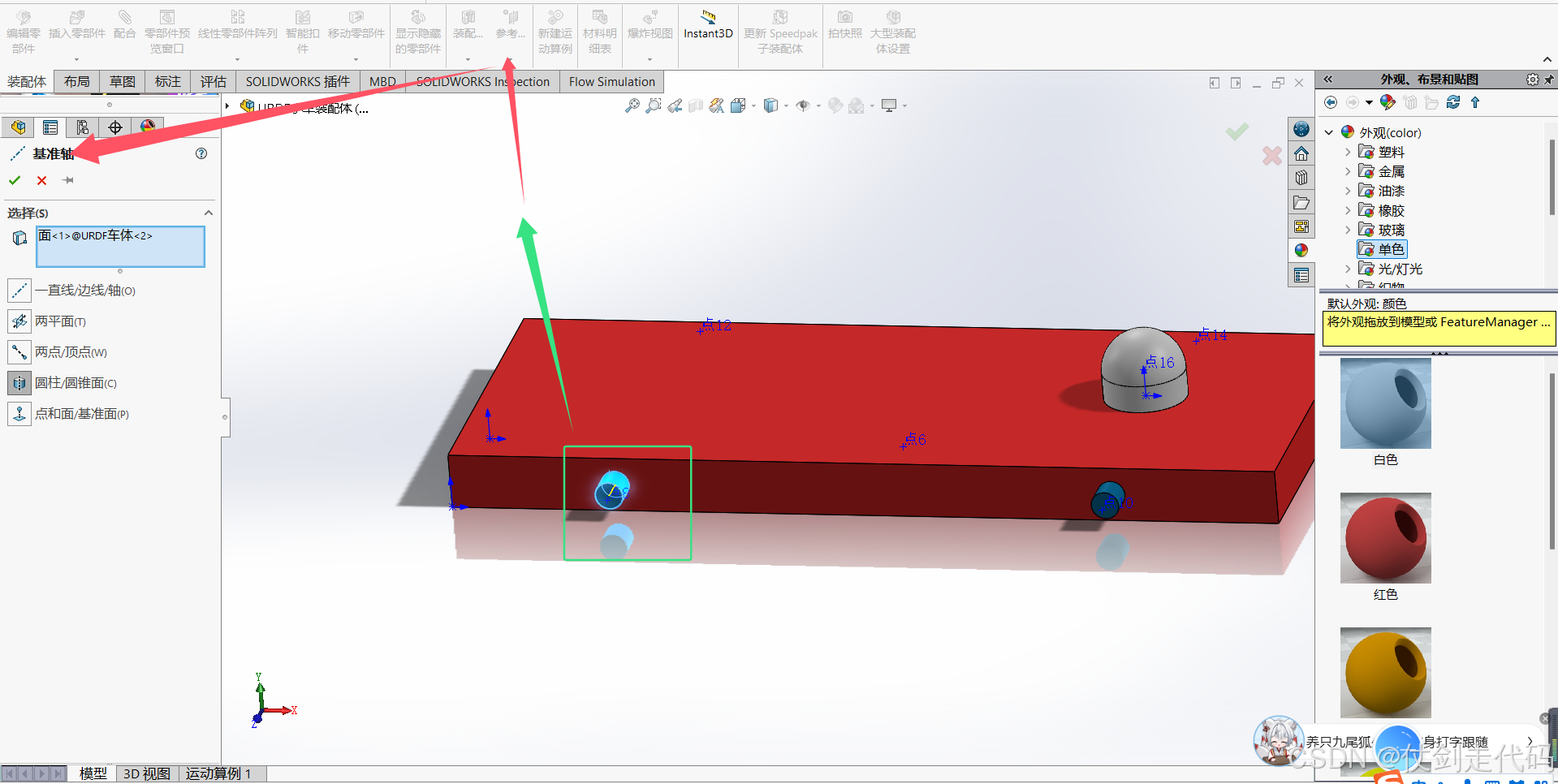
最后为车体的每个转轴添加基准轴。
 Export as URDF
Export as URDF
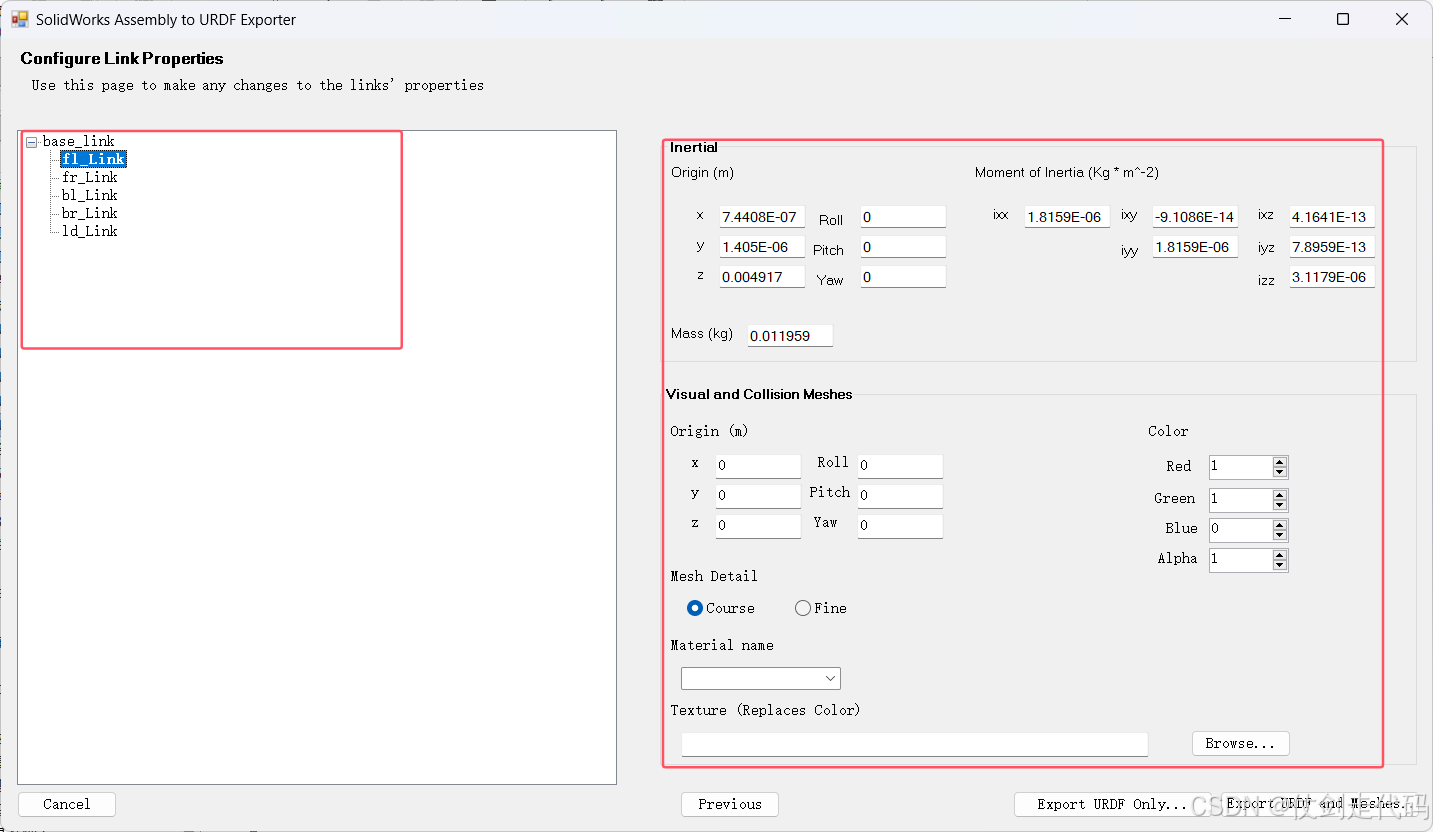
打开Export as URDF工具

先配置base_link,child links选为5,因为小车底盘连接有4个轮子和一个激光雷达。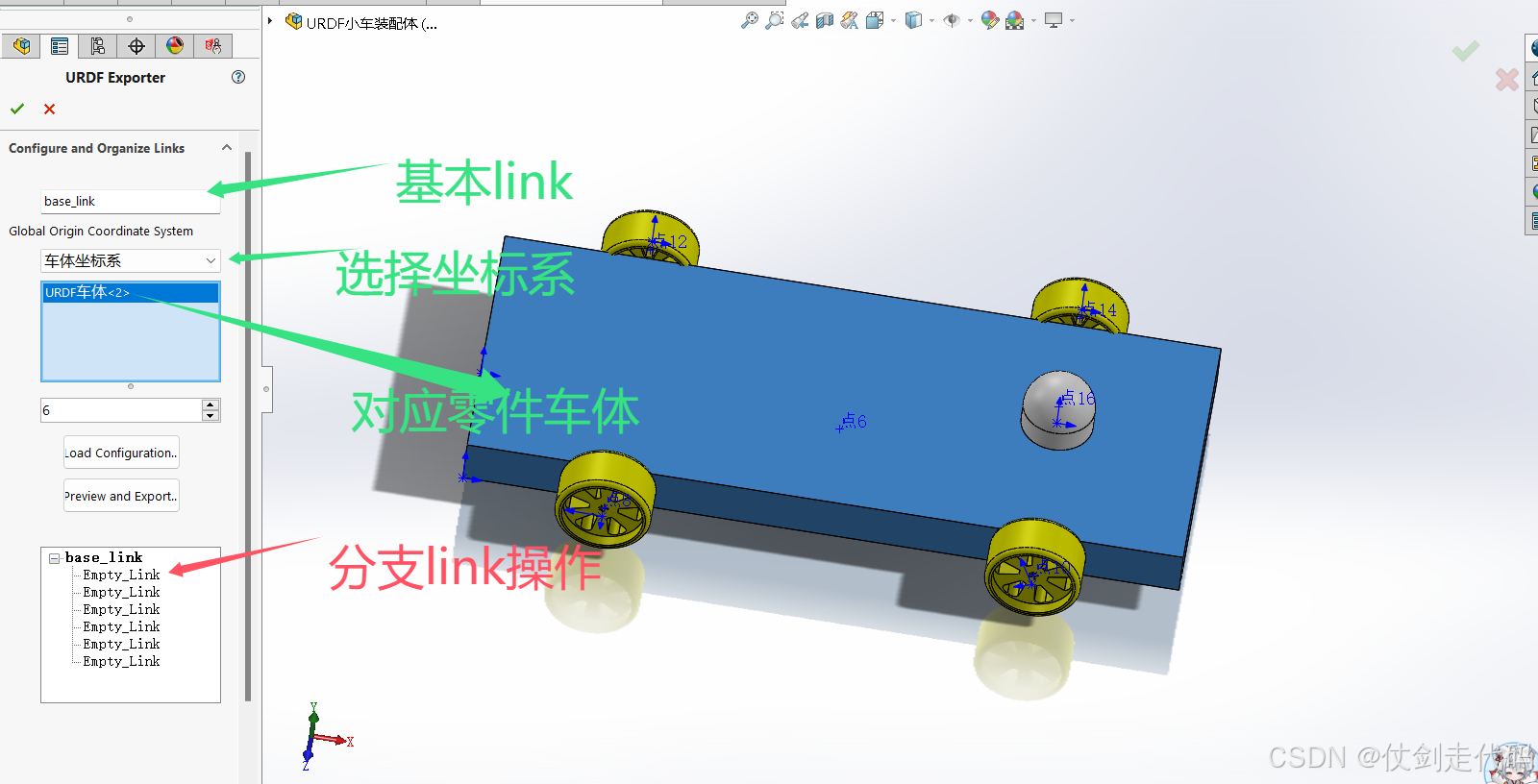
然后点击Empty_Link,对child links进行配置。
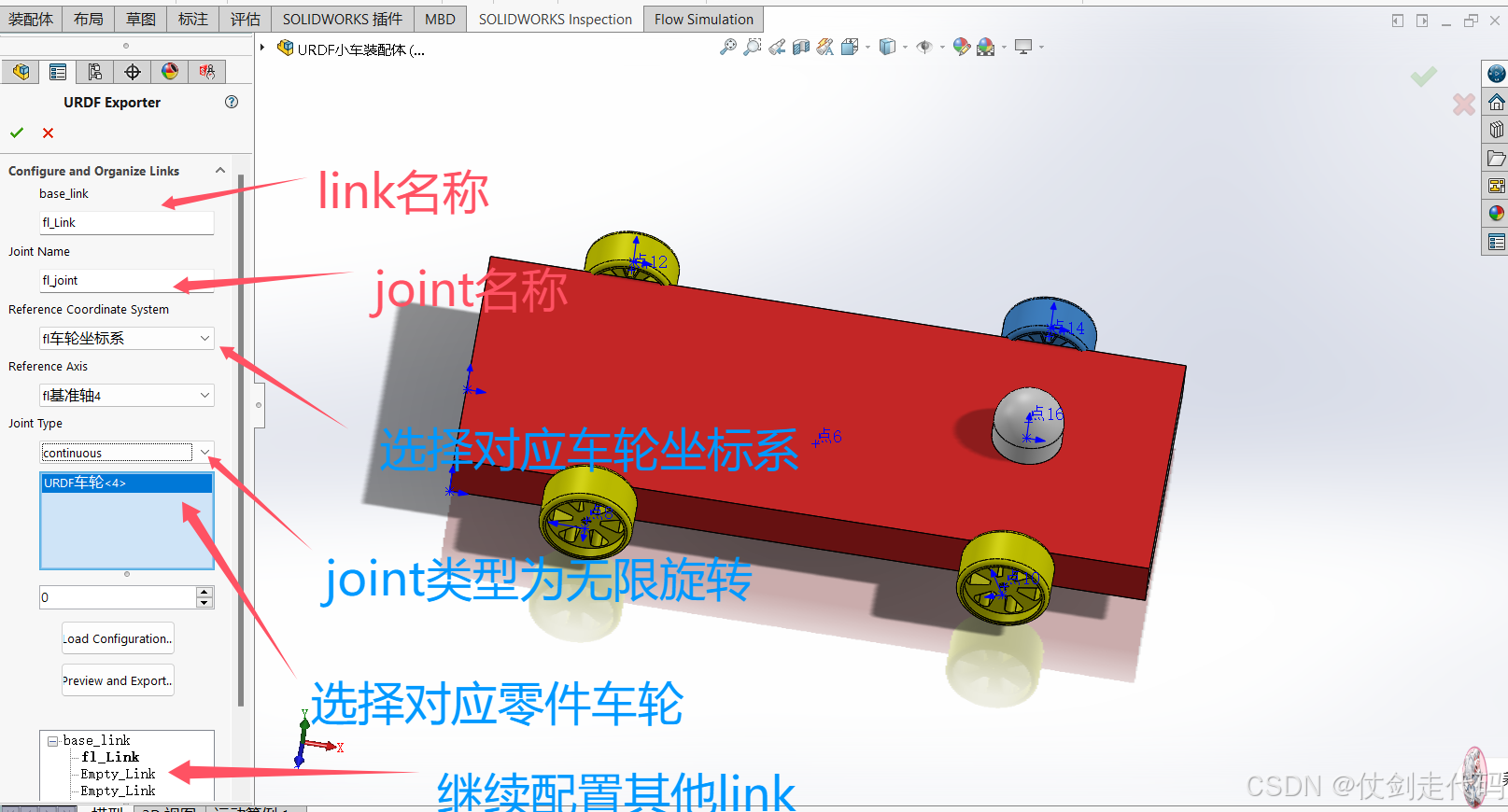
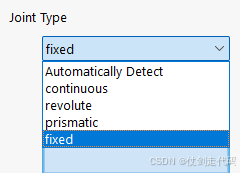
 补充joint说明
补充joint说明
continuous:无限旋转
revolute:有限范围旋转
prismatic:沿轴滑动
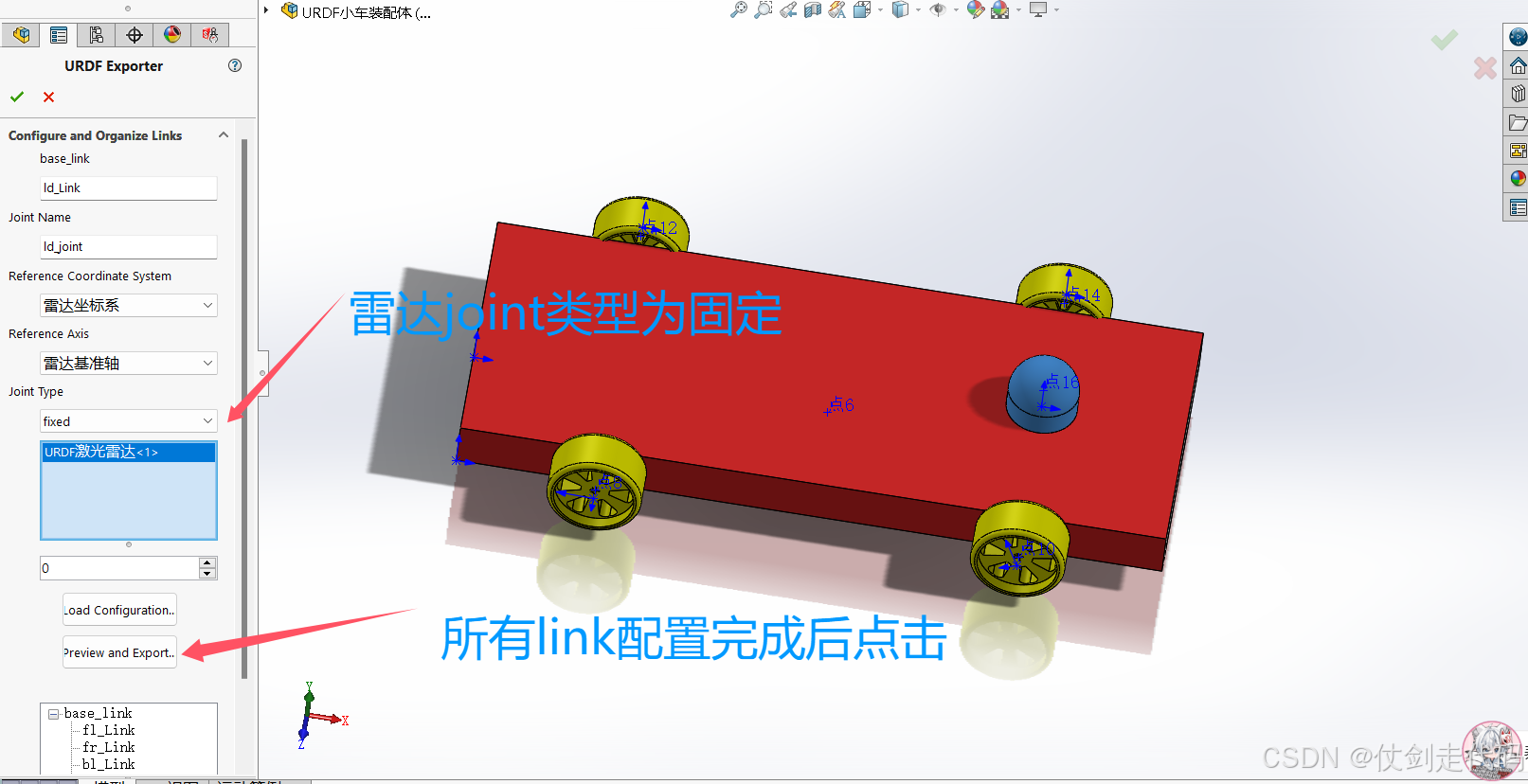
fixed:固定
配置完所有link后,点击“Preview and Export”选项,检查joint配置内容,有问题的话可以在此处进行修改,没问题就next
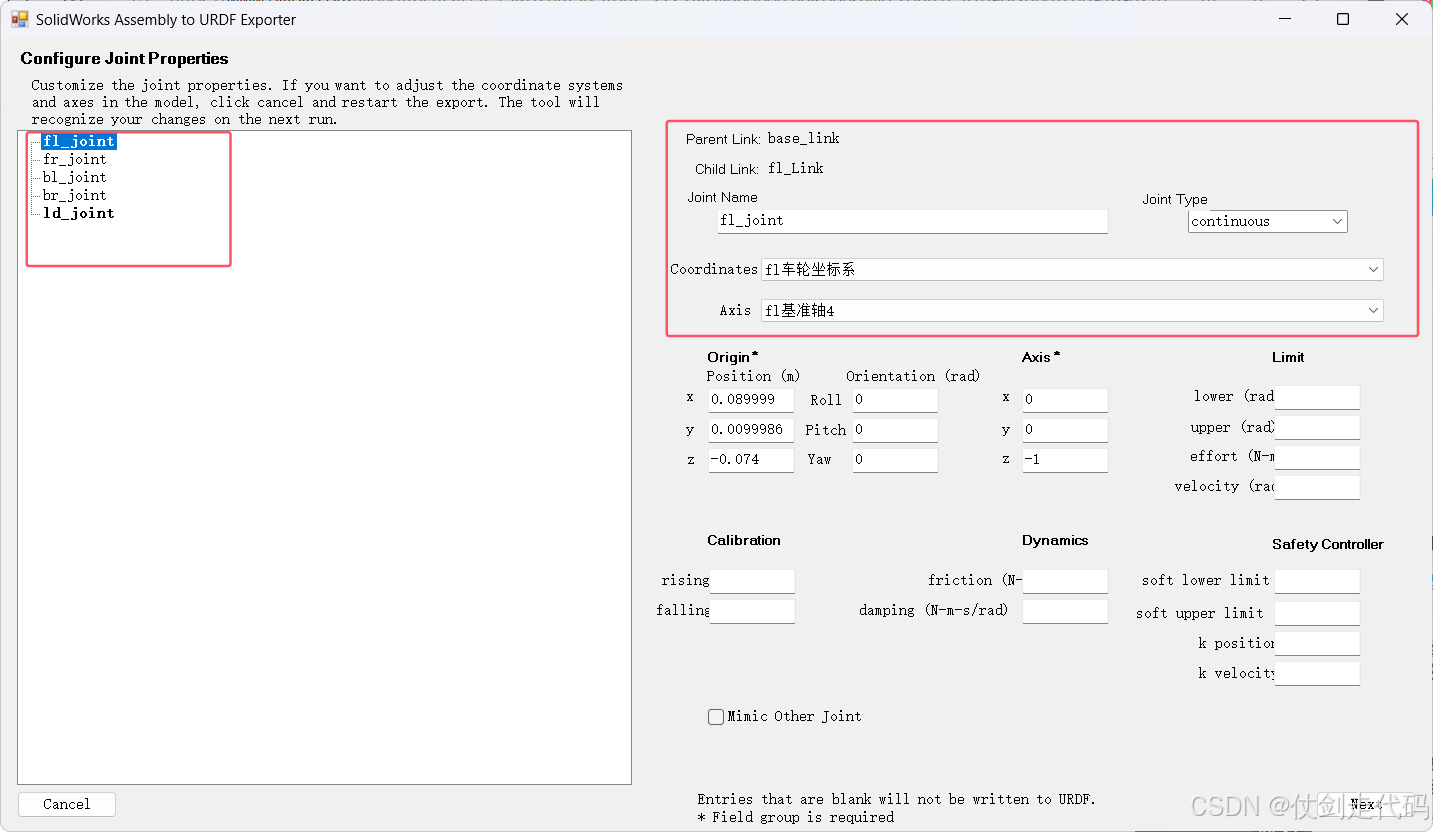 检查link
检查link
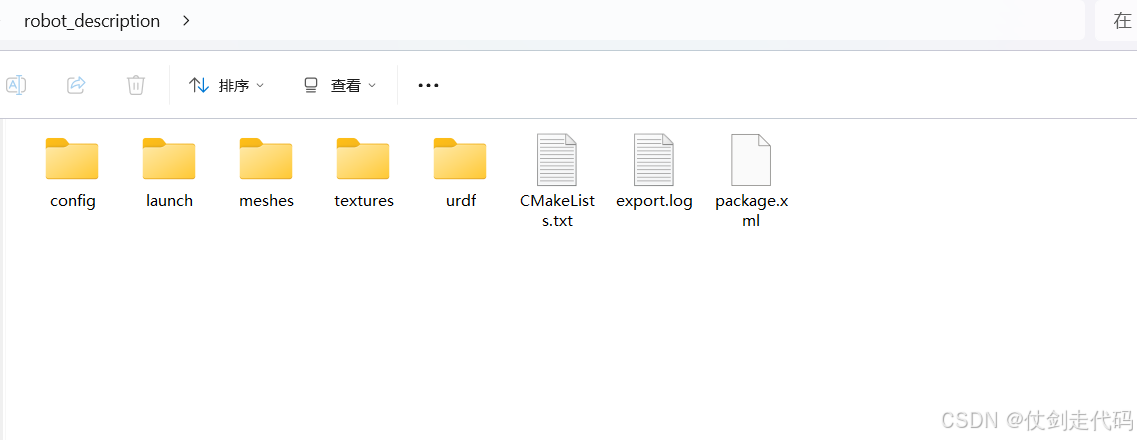
没有问题点击“Export URDF and Meshes”。选择路径对导出文件进行保存。
自主命名,我命名为robot_description导出文件如下
将文件放入ubuntu中
将文件放入到ros的工作空间中,编译一下工作空间
在ros工作路径下打开终端,输入编译命令
catkin_make --pkg robot_description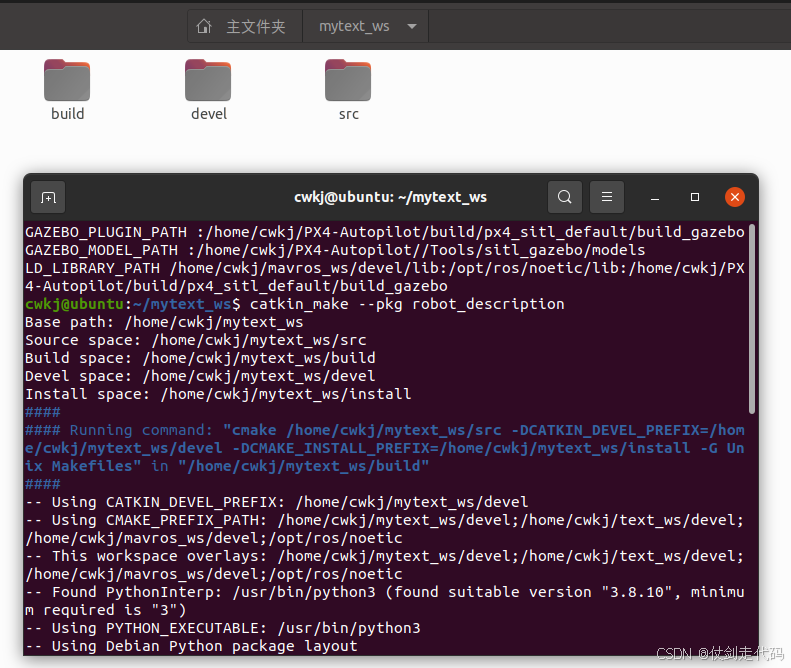
运行rviz
终端输入命令
roslaunch robot_description display.launch 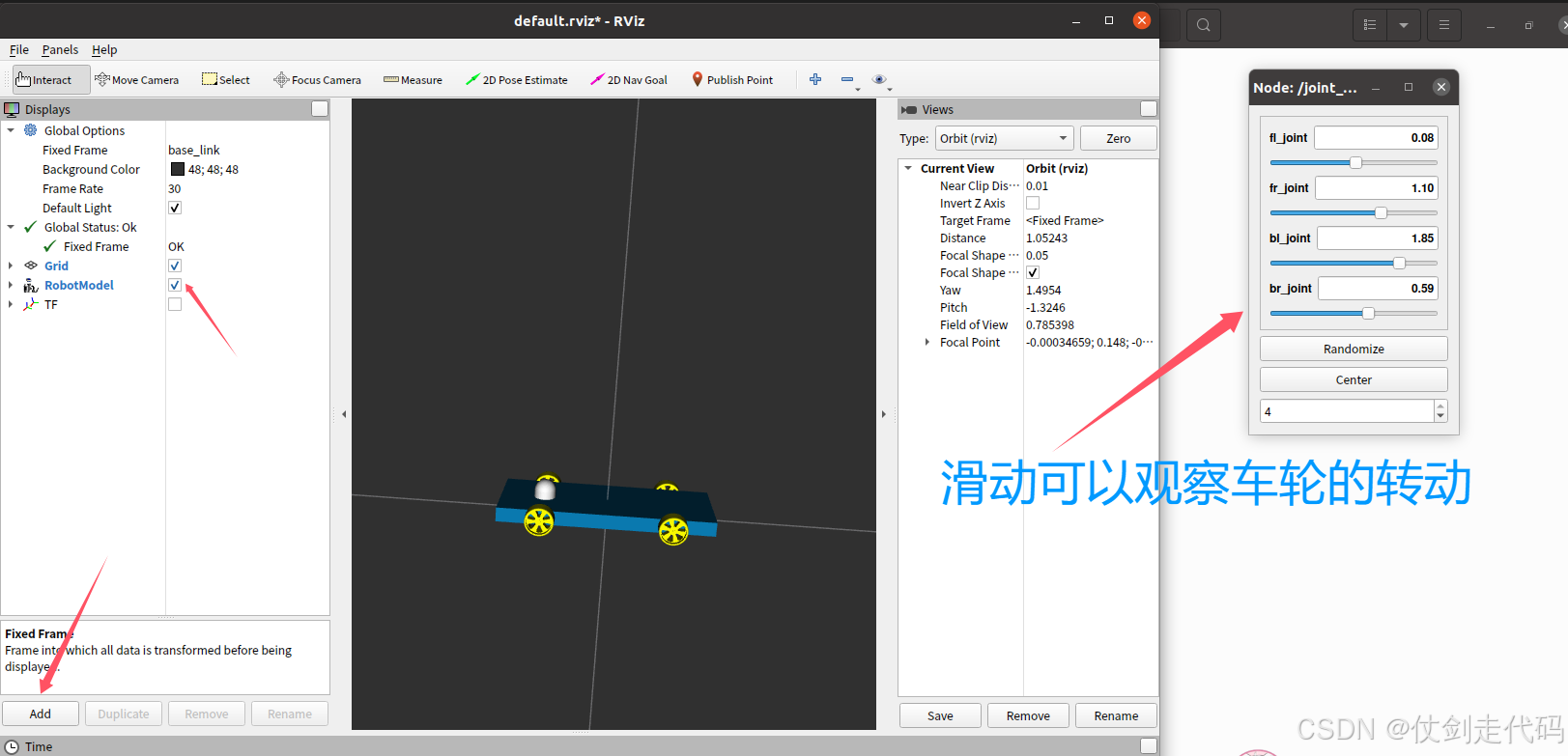
运行gazebo
终端输入命令
roslaunch robot_description gazebo.launch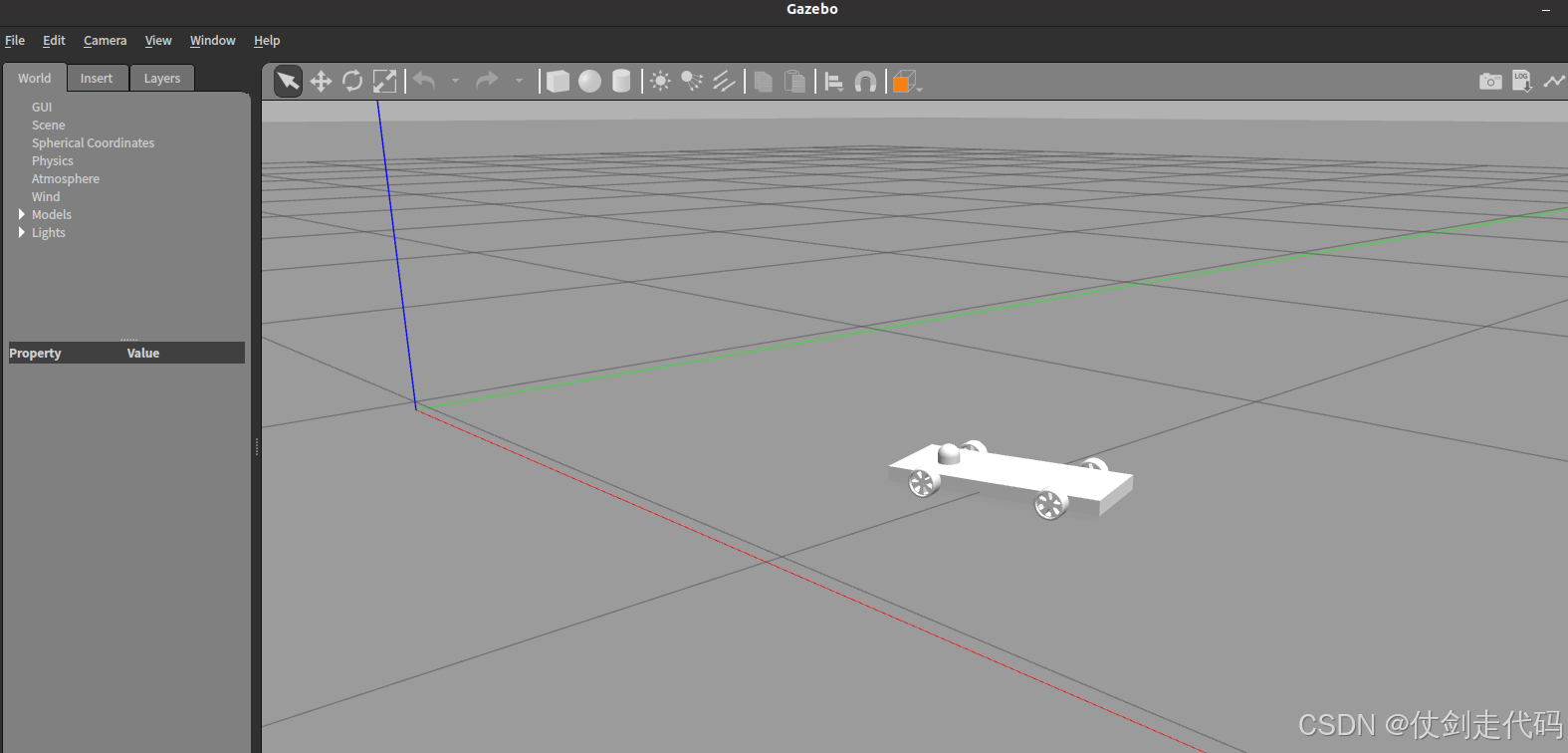
至此就完整的创造了一个小车模型的urdf,后续可以按照前两章方法进行添加传感器等操作实现仿真效果。



















 972
972

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











