




目录
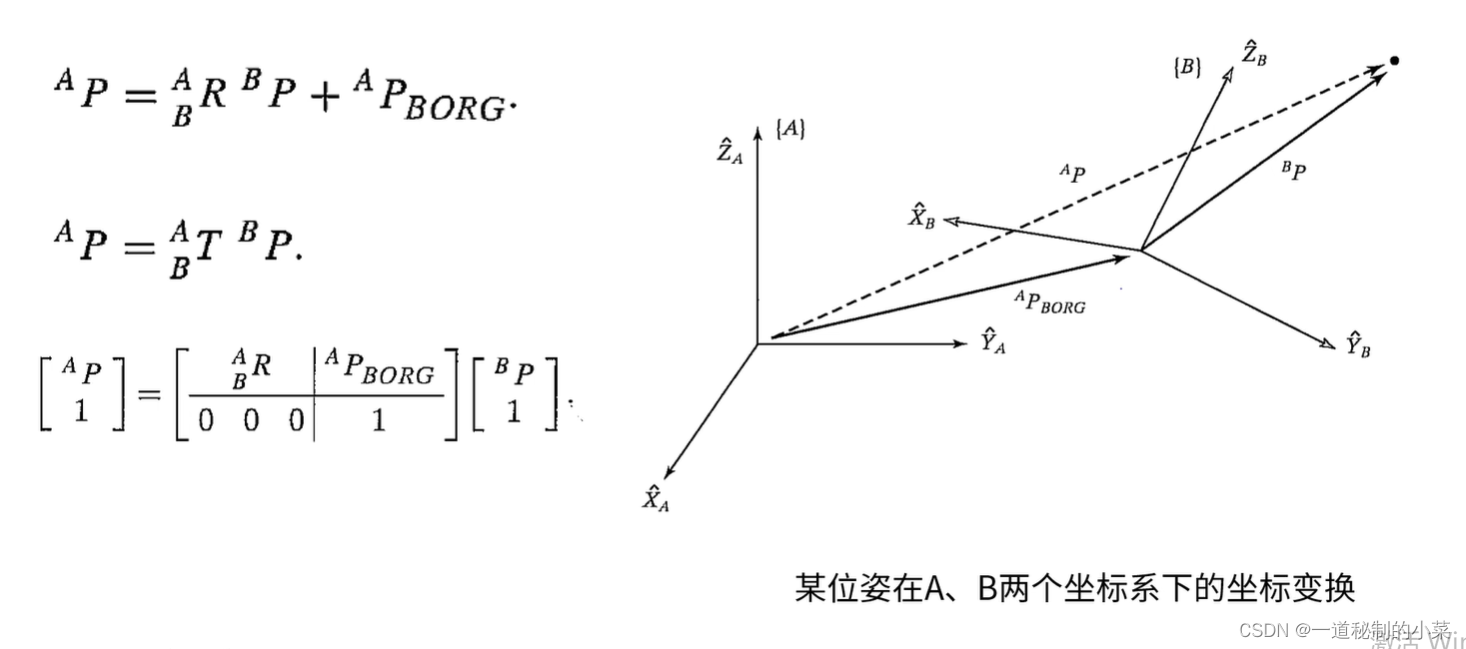
一、机器人作中的坐标变换
TF功能包能干什么?
- 五秒钟之前,机器人头部坐标系相对于全局坐标系的关系是什么样子的?
- 机器人夹取的物体i相对于机器人中心坐标系的位置在哪里?
- 机器人中心坐标系相对于全局坐标系的位置在哪里?
- 具有时间属性,默认可以记录十秒钟之内机器人所有的坐标系之间的位置关系。
TF坐标转换如何实现?
- 广播TF变换
- 监听TF变换
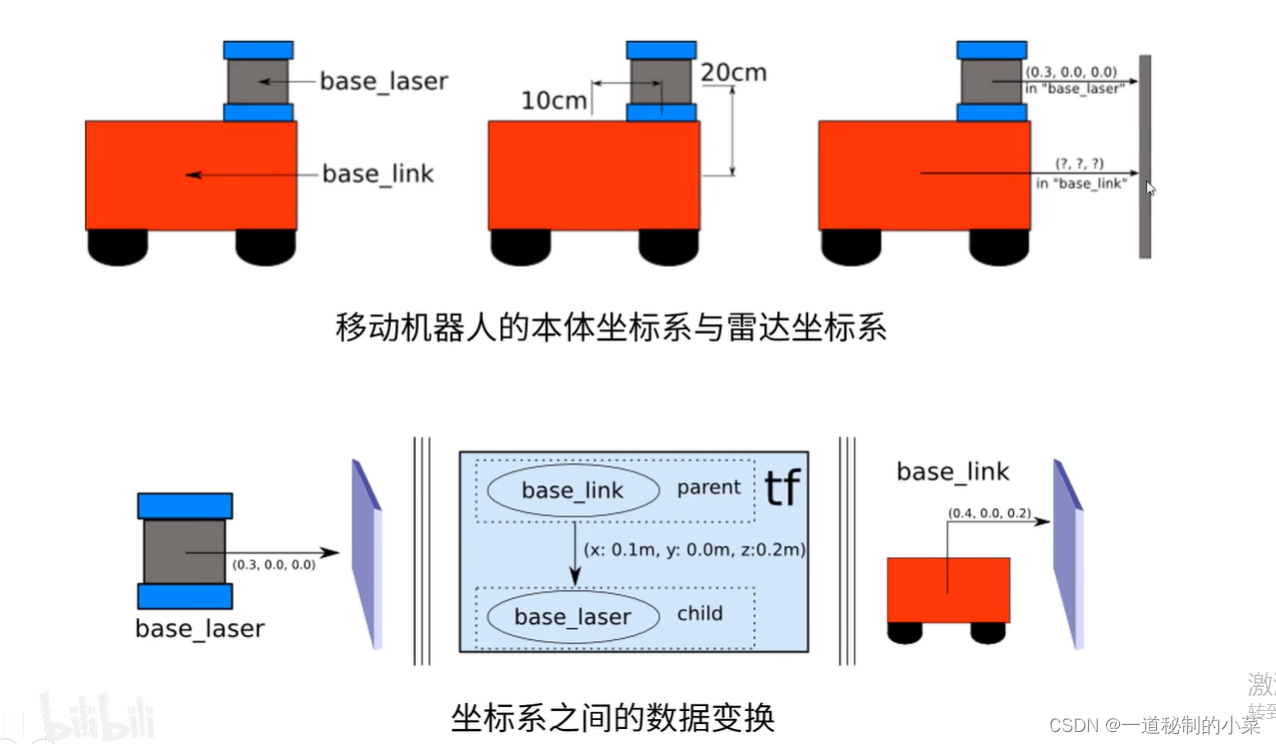
例如移动机器人的本体坐标系与雷达坐标系
二、海龟案例
1. 下载工具包(对应20.04版本的Noetic)
sudo apt-get install ros-noetic-tf
2. 运行launch文件
roslaunch turtle_tf turtle_tf_d 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 446
446

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











