








我年轻时很穷,努力了几年,终于不再年轻了
0. 一些概念
-
RTSP是 TCP/IP 协议体系中的一个应用层协议,该协议定义了一对多应用程序如何有效地通过 IP 网络传送多媒体数据。RTSP在体系结构上位于RTP和RTCP之上,它使用TCP或UDP完成数据传输。其中,TCP/UDP是发送视频数据的网络层协议,RTSP/RTP/RTCP是解析视频数据的应用层协议,注意区分!
-
RTSP服务、RTSP推流、RTSP拉流,缺一不可,尤其是RTSP服务。
-
RTSP服务器、RTSP客户端。推流和拉流都是由客户端发起,向服务器发起对应的请求。RTSP推流一般由RTSP相机或app发起,RTSP拉流一般由上位机的app发起。
-
RTSP服务器默认端⼝是554,在客户端SETUP的时候会把⾃身的RTP和RTCP端⼝告知服务器。在RTSP的session建⽴后,会使⽤RTP/RTCP在约定好的端⼝上传输数据。
-
向服务端推流
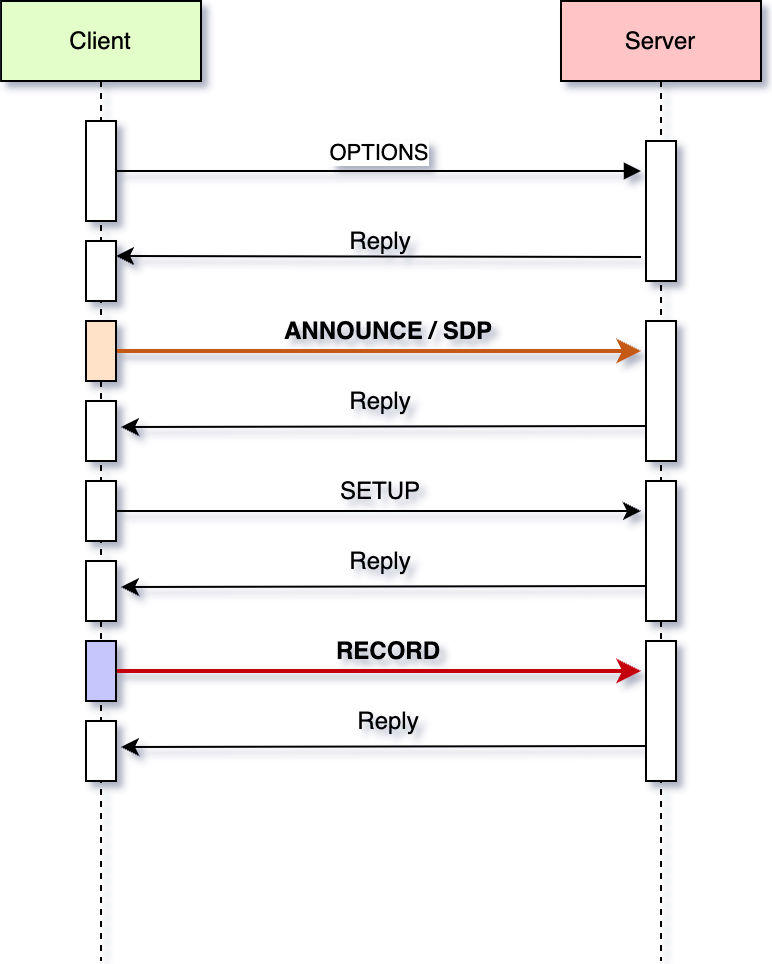
-
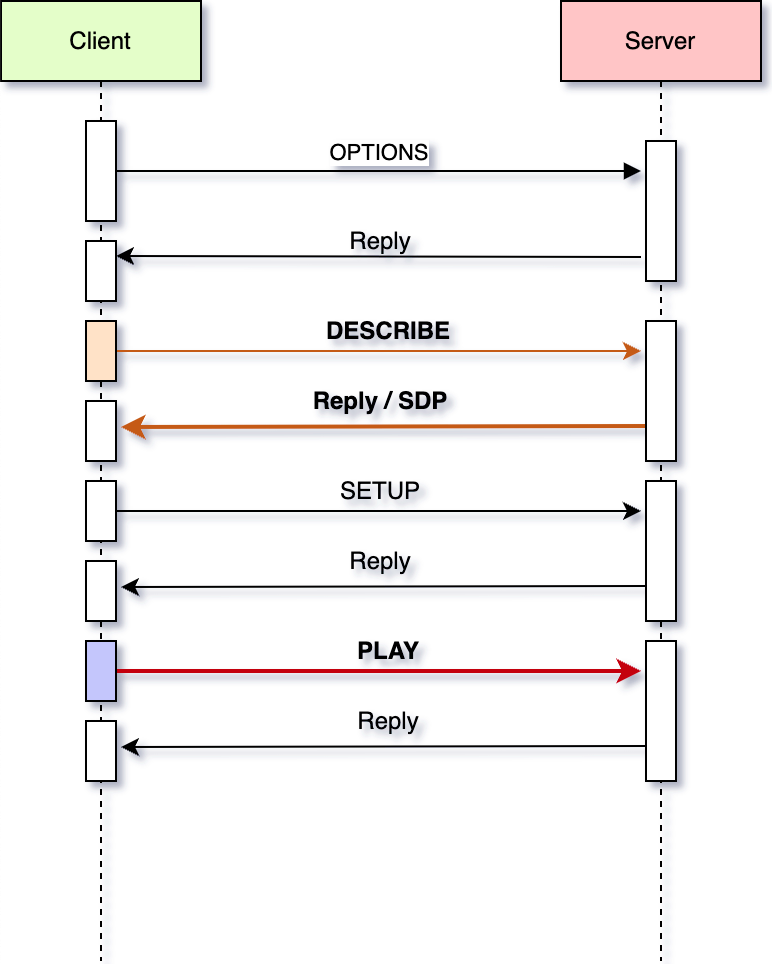
从服务端拉流
1. Ubuntu搭建RTSP服务器的方式
-
live555
live555 Media Server -
gstreamer
gst-rtsp-server包
c++编写
注意:安装gstreamer-1.0时并不会自动安装gst-rtsp-server,gst-rtsp-server需要另行通过make方式安装,如下:git clone -b 1.8 https://github.com/GStreamer/gst-rtsp-server.git //下载源码 cd gst-rtsp-server git submodule update --init --recursive ./autogen.sh sudo make sudo make install -
FFmpeg
搭建不了服务,只能推流、拉流、播放! -
rtsp-simple-server
go语言编写 -
EasyDarwin
easy-darwin -
ZLMediaKit
推荐使用!!
使用文档:https://github.com/ZLMediaKit/ZLMediaKit/wiki/快速开始
2. 在Ubuntu上搭建RTSP服务器
推荐使用ZLMediaKit,以Ubuntu为例:
ZLMediaKit使用文档:https://github.com/ZLMediaKit/ZLMediaKit/wiki/快速开始
- 下载
git clone --depth 1 https://gitee.com/xia-chu/ZLMediaKit cd ZLMediaKit git submodule update --init # 安装依赖,可选。参考文档 - 编译
cd ZLMediaKit mkdir build cd build cmake .. make -j4 - 运行
cd ZLMediaKit/release/linux/Debug #通过-h可以了解启动参数 ./MediaServer -h # 以守护进程模式启动:主进程关闭自动重启。需要加sudo,因为544端口需要管理员权限!!!! sudo ./MediaServer -d # 设置log打印等级:0~4,等级越高越简洁,下图是等级0 sudo ./MediaServer -d -l 0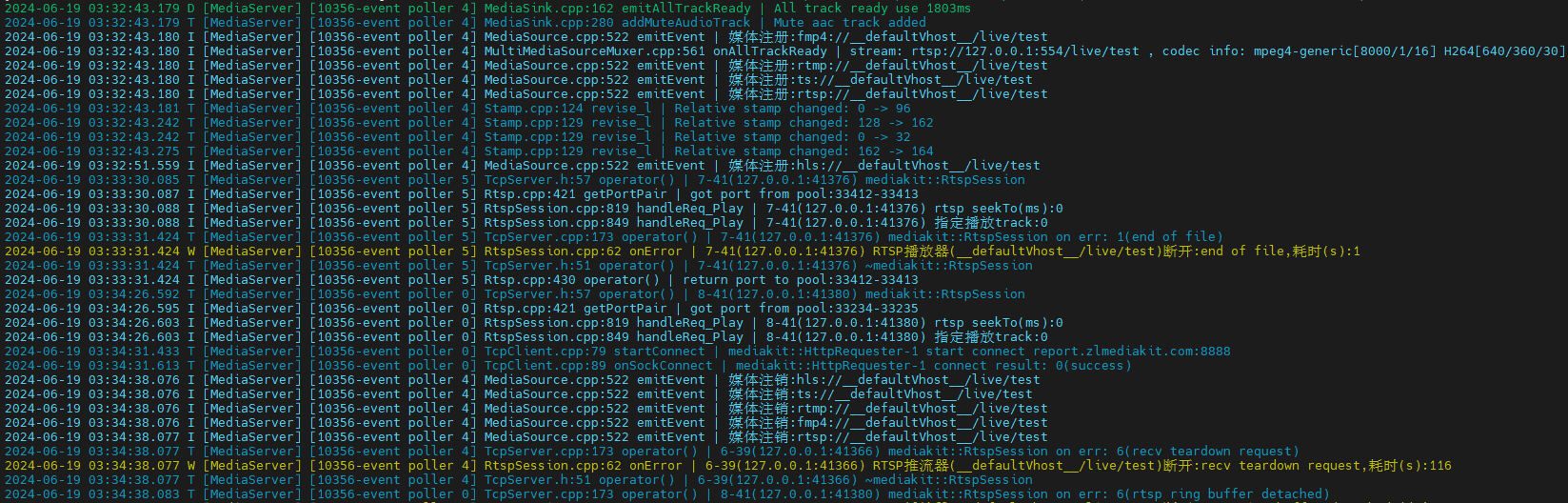
- 关闭服务
sudo killall -2 MediaServer - log
log保存在ZLMediaKit/release/linux/Debug/log中。 - 推流测试
要先开启RTSP服务再推流不然会报类似下面的错误:

用ffmpeg 推:
推流成功后查看ZLMediaKit的log可以得到更多有用的信息:# ZLMediaKit的RTSP服务默认端口是554,可缺省!/live是参数之一,不能少!!! ffmpeg -re -i "/path/to/test.mp4" -vcodec h264 -acodec aac -f rtsp -rtsp_transport tcp rtsp://127.0.0.1/live/test

- 拉流播放测试
注意:rtsp地址要与推流地址保持一致,不然无法拉取和播放!!注意ffplay -rtsp_transport tcp -i rtsp://127.0.0.1:554/live/testlive是参数不能漏!!
3. 推流
要先开启RTSP服务再推流不然会报类似下面的错误:
- ffmpeg
推流成功后查看ZLMediaKit的log可以得到更多有用的信息:# ZLMediaKit的RTSP服务默认端口是554,可缺省!/live是参数之一,不能少!!! ffmpeg -re -i "/path/to/test.mp4" -vcodec h264 -acodec aac -f rtsp -rtsp_transport tcp rtsp://127.0.0.1/live/test
- opencv + ffmpeg
int main(int argc, char **argv) { //rtsp std::string rtsp_server_url = "rtsp://127.0.0.1:554/live/0"; std::stringstream command; command << "ffmpeg "; // inputfile options command << "-y " // overwrite output files << "-an " // disable audio << "-f rawvideo " // force format to rawvideo << "-vcodec rawvideo " // force video rawvideo ('copy' to copy stream) << "-pix_fmt bgr24 " // set pixel format to bgr24 << "-s 640x480 " // set frame size (WxH or abbreviation) << "-r 30 "; // set frame rate (Hz value, fraction or abbreviation) command << "-i - "; // outputfile options command << "-c:v libx264 " // Hyper fast Audio and Video encoder << "-pix_fmt yuv420p " // set pixel format to yuv420p << "-tune:v zerolatency " << "-preset ultrafast " // set the libx264 encoding preset to ultrafast << "-f rtsp " // force format to flv for rtmp, rtsp for rtsp << rtsp_server_url; FILE *fp = nullptr; try { cv::Mat frame; vpRealSense2 rs2; std::string product_line2 = rs2.getProductLine();//获取相机信息 std::cout << "Product line: " << product_line2 << std::endl; rs2::config config2; config2.enable_stream(RS2_STREAM_COLOR, 640, 480, RS2_FORMAT_RGBA8, 30);//配置相机 config2.enable_stream(RS2_STREAM_DEPTH, 640, 480, RS2_FORMAT_Z16, 30); config2.enable_stream(RS2_STREAM_INFRARED, 640, 480, RS2_FORMAT_Y8, 30); rs2.open(config2);//启动相机 vpCameraParameters cam2 = rs2.getCameraParameters(RS2_STREAM_COLOR);//获取相机 内参 vpImage<vpRGBa> I2(rs2.getIntrinsics(RS2_STREAM_COLOR)
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









