







 文章详细描述了Ardupilot飞控中从EKF1到EKF3的滤波算法演变,讨论了DCM和EKF的选择,以及EKFlane的使用和配置,包括传感器如IMU、GPS和气压计的分配机制。特别关注了laneswitching的情况和代码实现细节。
文章详细描述了Ardupilot飞控中从EKF1到EKF3的滤波算法演变,讨论了DCM和EKF的选择,以及EKFlane的使用和配置,包括传感器如IMU、GPS和气压计的分配机制。特别关注了laneswitching的情况和代码实现细节。
1. EKF1~EKF3
待续…
2. Ardupilot滤波算法的演变
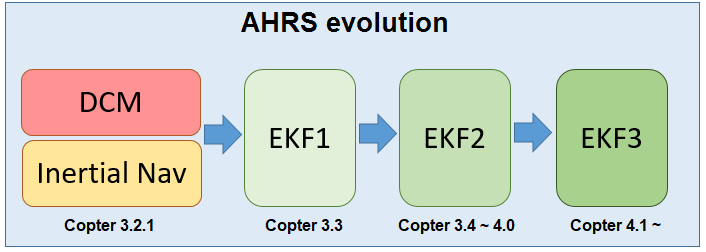
使用DCM还是EKF?
AHRS_EKF_USE: set to “1” to use the EKF, “0” to use DCM for attitude control and inertial nav (Copter-3.2.1) or ahrs dead reckoning (Plane) for position control. In Copter-3.3 (and higher) this parameter is forced to “1” and cannot be changed.
3. EKF3
- AHRS_EKF_TYPE = 3
EK2_ENABLE = 0
EK3_ENABLE = 1 - 飞控有多少个IMU就会运行多少个 EKF core 或称 EKF lane
EK3_IMU_MASK 参数决定哪些IMU用于运行EKF lane. - 只有一个EKF lane 被用作飞机的状态估计AHRS,由参数EK3_PRIMARY决定,0 selects the first IMU lane in the EK3_IMU

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









