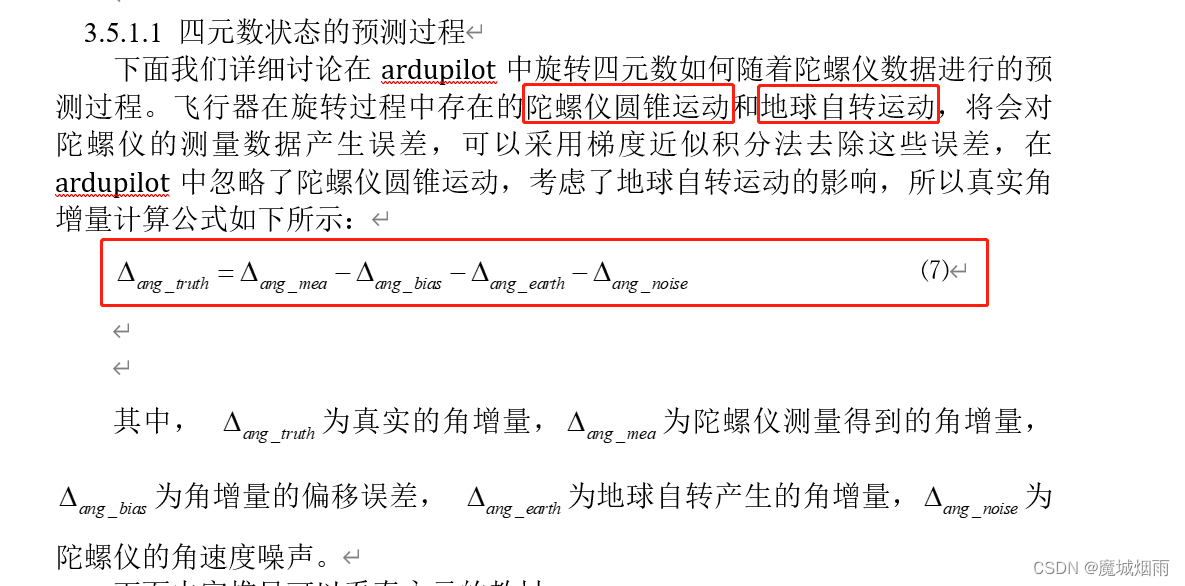
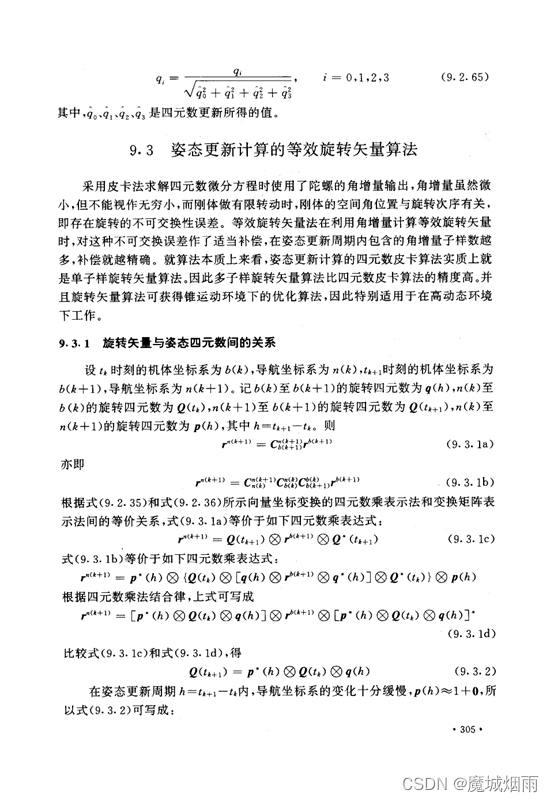
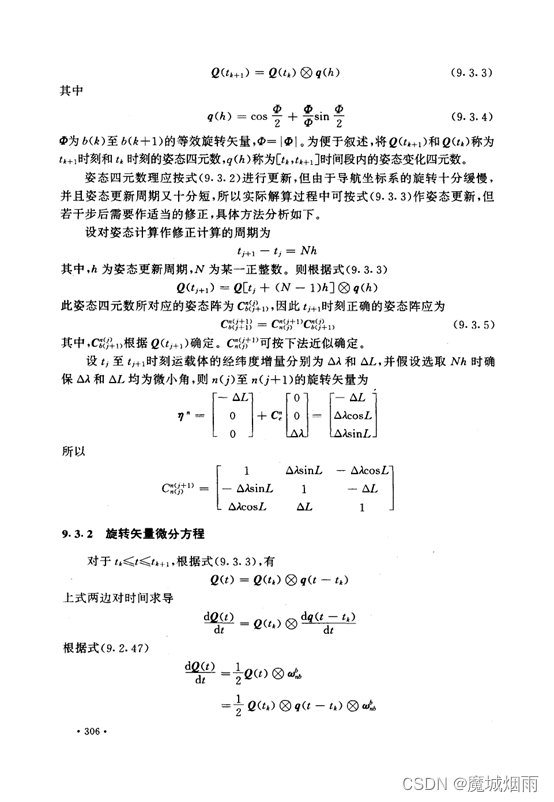
目录 文章目录 目录 摘要 1.四元数预测方程传播 摘要 本节主要记录Ardupilot EKF3核心算法《四元数预测方程》过程。 1.四元数预测方程传播 四元数的获取主要从IMU中的陀螺仪得到,下面来分析每来一个 IMU 角增量数据 和速度增量数据 ,状态向量是如何从第k 时刻传播到第 k+1时刻的。对于陀螺仪角增量偏移和加速度速度增量偏移、 地理磁场向量和风速是不随 IMU 变化的,因此我们只需讨论四元数、速度和位置的传播。本节主要先讲解四元数的预测传播过程。 下面是秦永元的惯性导航中的内容。








 超级会员免费看
超级会员免费看
 本文深入探讨Ardupilot EKF3算法中四元数预测方程的传播过程,重点阐述如何利用IMU的陀螺仪数据将状态从k时刻更新到k+1时刻,同时考虑了噪声影响的处理。通过对角增量的近似,得出四元数预测模型的关键方程。
本文深入探讨Ardupilot EKF3算法中四元数预测方程的传播过程,重点阐述如何利用IMU的陀螺仪数据将状态从k时刻更新到k+1时刻,同时考虑了噪声影响的处理。通过对角增量的近似,得出四元数预测模型的关键方程。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 983
983

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








