







 本文探讨了在不同情况下如何处理非冗余及冗余机器人的雅克比矩阵,包括当矩阵不是方阵时如何求逆的问题。特别讨论了在机器人出现奇异现象时的解决方法。
本文探讨了在不同情况下如何处理非冗余及冗余机器人的雅克比矩阵,包括当矩阵不是方阵时如何求逆的问题。特别讨论了在机器人出现奇异现象时的解决方法。
疑问:比如说雅克比矩阵J为6x2矩阵,任务维度也是2,那么要如何求逆呢 是不是也可以用广义逆的方法
如果雅克比矩阵J为6x4矩阵,但是一个对象在空间中是6个自由度,这又要怎么处理
1.非冗余机器人
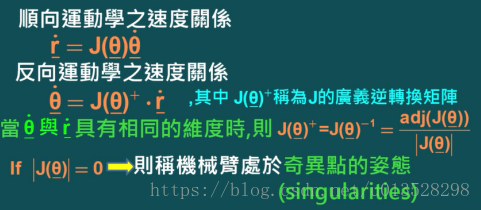
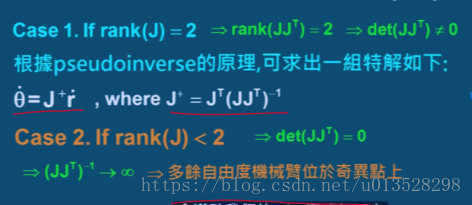
雅克比矩阵的秩小于其最大值时,det(J)=0。机器人出现奇异现象。
Ps:使用广义逆主要还是考虑到,雅克比矩阵并不一定是方阵。可能是长条形的比如6Xn矩阵
2.冗余机器人
雅克比矩阵的秩小于其任务维度m时,机器人发生奇异现象。
下图中的例子,是一个平面三连杆机器人,在平面上运动,机械臂自由度是n=3,任务维度是m=2

















 966
966

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









