







 本文介绍了在使用Viewableobjects中的visionsensors时遇到的问题及解决方法。通过调整方块属性,成功解决了传感器无法探测到物体的问题。
本文介绍了在使用Viewableobjects中的visionsensors时遇到的问题及解决方法。通过调整方块属性,成功解决了传感器无法探测到物体的问题。
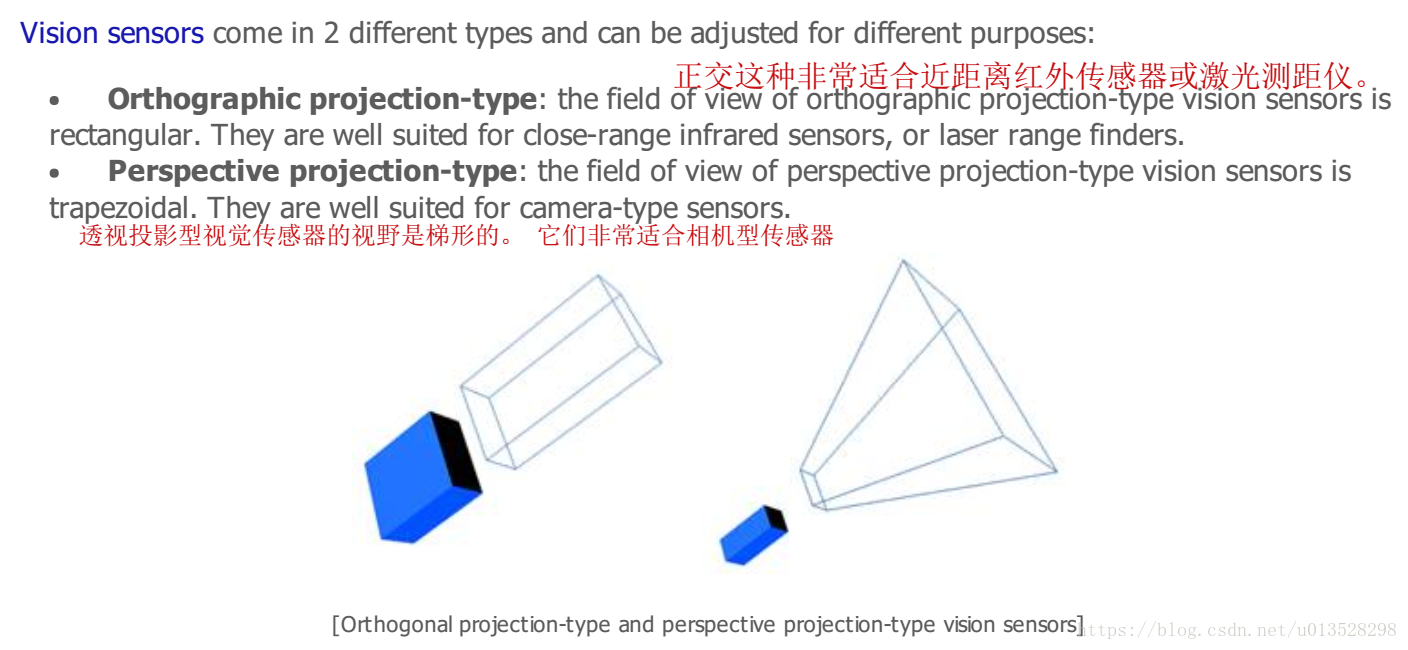
Viewable objects有两种:
- camera
- vision sensors今天主要
今天主要介绍一下vision sensors。
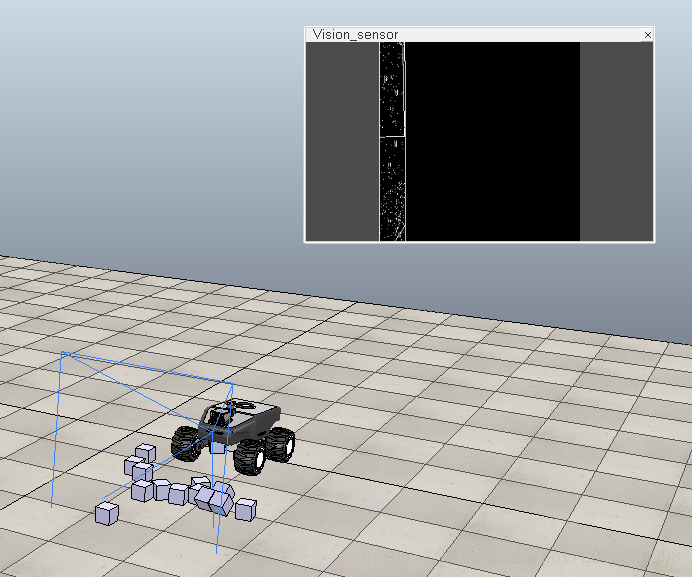
这个传感器使用的时候是不是不能和机器人在一个 box里,但是还是要验证,不过目前的情况是这样的根本无法探测到传感器前的物体。
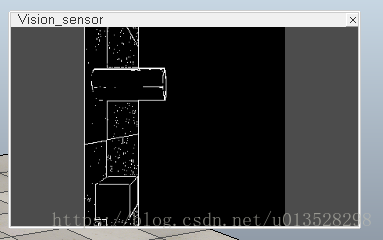
目前验证的的结果如下:
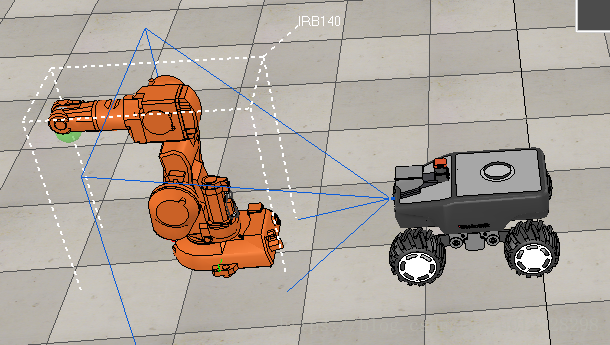

也就是说是能看到这个机器人的。那么为什么看不到这些方块??也许是和物体的某个属性没有设置,这个还需要再验证!
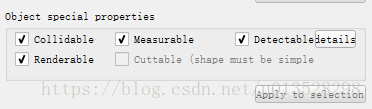
果然是这样,把方块的这些属性勾起来就行了。
Viewable objects有两种:
今天主要介绍一下vision sensors。
这个传感器使用的时候是不是不能和机器人在一个 box里,但是还是要验证,不过目前的情况是这样的根本无法探测到传感器前的物体。
目前验证的的结果如下:
也就是说是能看到这个机器人的。那么为什么看不到这些方块??也许是和物体的某个属性没有设置,这个还需要再验证!
果然是这样,把方块的这些属性勾起来就行了。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





















 833
833





