




给定四边形a, b, c, d的四条边,根据给定的边数求四边形的最大面积。
例子:
输入:1 2 1 2
输出:2.00
构造一个矩形以获得最大面积是最佳的。
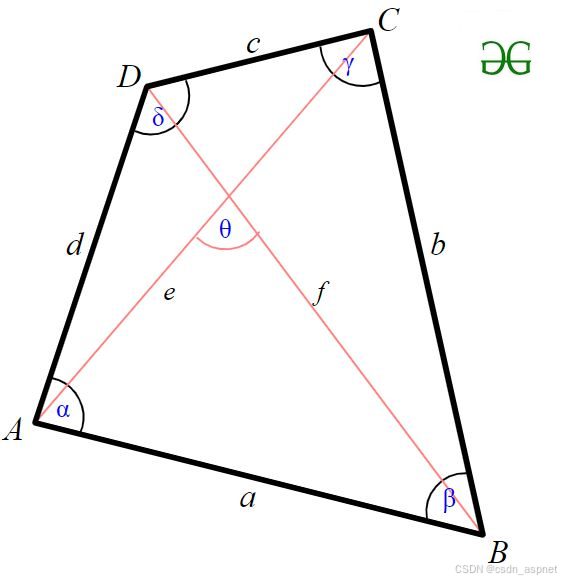
根据Bretschneider 公式,一般四边形的面积为,K=

这里,a、b、c、d 是四边形的边长,s 是四边形的半周长,角是两个对角。
因此,只有当对角和等于 π(180) 时,该公式才最大化。然后,我们可以使用 Bretschneider 公式的简化形式来计算(最大)面积 K。
![]()
这个公式被称为Brahmagupta 公式。
下面是给定方法的实现:
// CPP program to find maximum area of a
// quadrilateral
#include <stdio.h>
#include <math.h>
double maxArea(double a, double b,
double c, double d)
{
// Calculating the semi-perimeter
// of the given quadrilateral
double semiperimeter = (a + b + c + d) / 2;
// Applying Brahmagupta's formula to
// get maximum area of quadrilateral
return sqrt((semiperimeter - a) *
(semiperimeter - b) *
(semiperimeter - c) *
(semiperimeter - d));
}
// Driver code
int main()
{
double a = 1, b = 2, c= 1, d = 2;
printf("%.2f\n",maxArea(a, b, c, d));
return 0;
}
输出:
2.00
时间复杂度: O(logn)
辅助空间: O(1)
如果有人有在空间和时间方面更高效的更好解决方案,请提出建议。
如果您喜欢此文章,请收藏、点赞、评论,谢谢,祝您快乐每一天。



















 1313
1313

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











