 MissionPlanner数据分析详解
MissionPlanner数据分析详解





Mission Planner 中的数据分析系统提供了加载、可视化和分析来自 ArduPilot 飞行器的飞行日志数据的工具。本页介绍了日志分析组件的工作原理、架构以及如何与 Mission Planner 的其他部分集成。
系统概述
数据分析系统允许用户:
- 打开并解析 ArduPilot 日志文件(文本和二进制格式)
- 在交互式图表和地图上可视化数据
- 过滤和搜索日志消息
- 分析飞行性能、错误和事件
- 导出数据以便在其他应用程序中进行详细分析
- 处理与航班相关的地理和地形数据
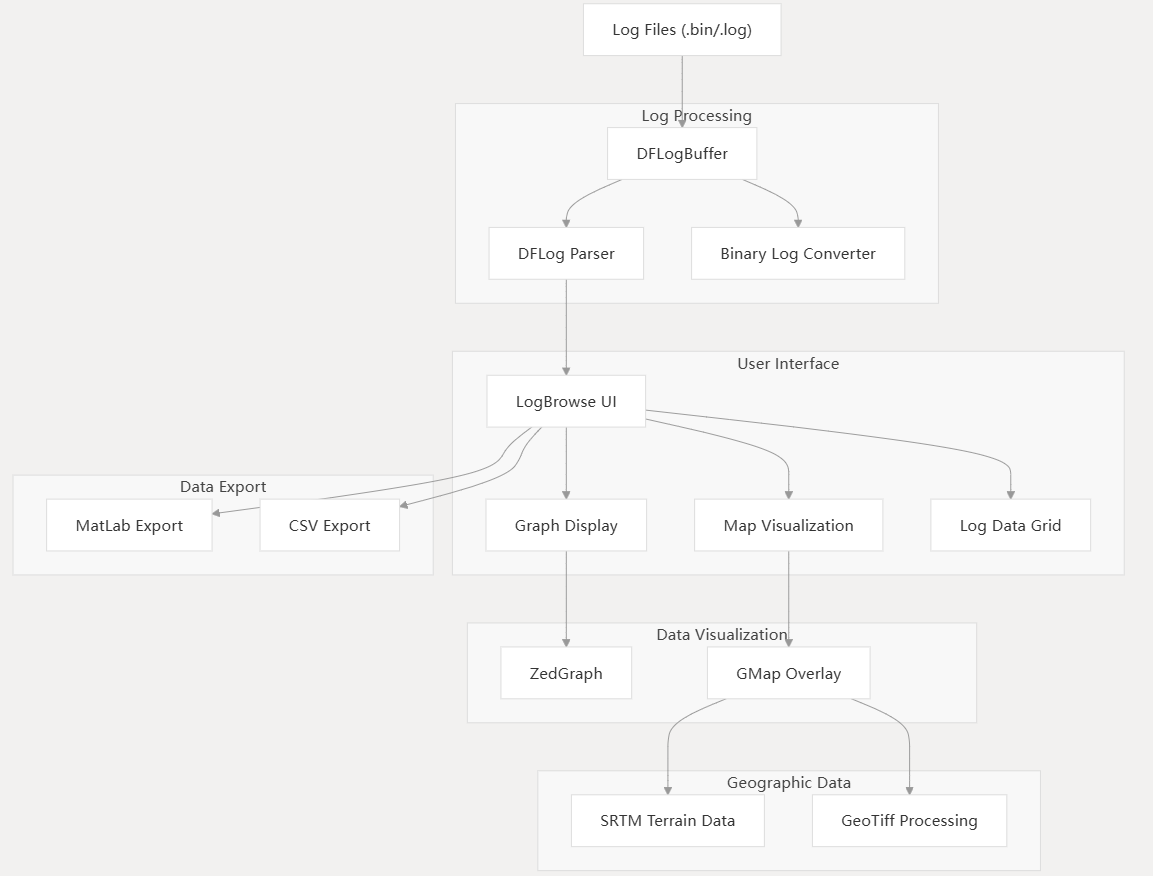
日志文件处理
Mission Planner 支持两种主要日志格式:
- 二进制日志(.bin) - 现代 ArduPilot 版本使用的紧凑二进制格式
- 文本日志 (.log) - 使用逗号分隔值的 ASCII 格式
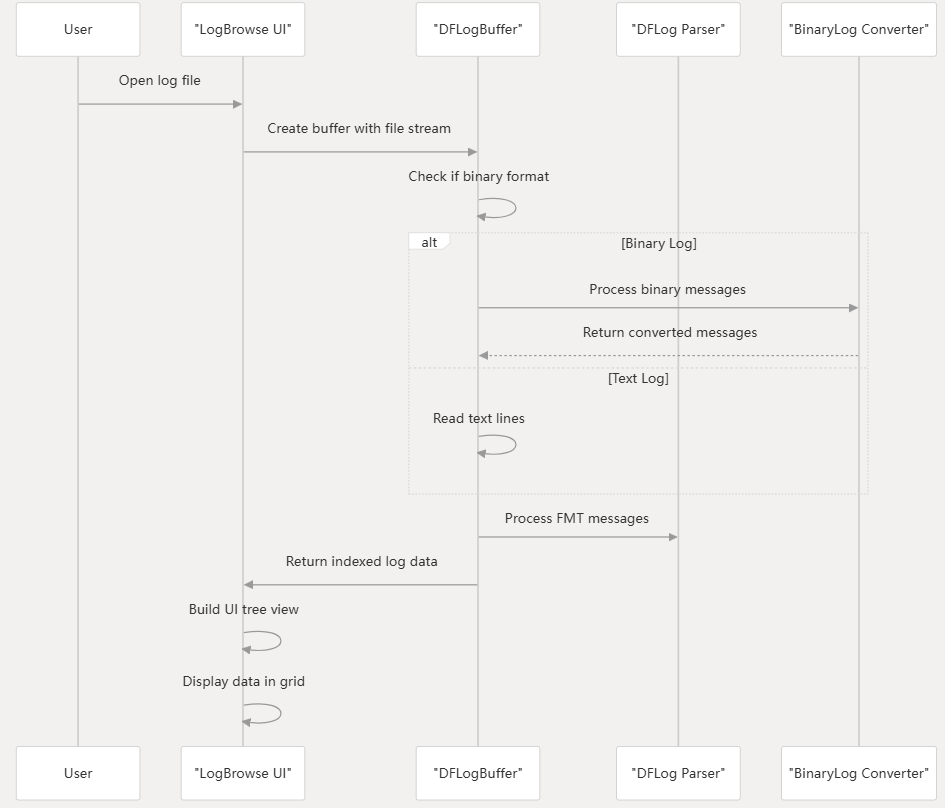
系统在加载文件时自动检测日志格式并进行相应的处理。
日志加载过程
日志格式结构
日志文件包含多种消息类型,每种类型都以唯一标识符开头:
| 消息类型 | 描述 |
|---|---|
| 裂解酶 | 描述其他消息结构的格式定义消息 |
| 帕姆 | 车辆参数值 |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2686
2686

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









