




介绍
罗盘校准是确保任何搭载 ArduPilot 的飞行器准确导航的关键步骤。本页介绍如何使用 Mission Planner 校准飞行器中的罗盘。正确的校准可以消除机载电子设备和机身结构的磁干扰,从而获得准确的航向信息。
Mission Planner 提供多种校准方法:
- 基于实时 GUI 的校准
- 基于对数的校准
- 机载校准(兼容的自动驾驶仪硬件支持)
有关一般指南针配置设置和参数的信息,请参阅车辆配置页面。
背景和重要性
指南针(磁力计)通过测量地球磁场来确定车辆的航向。然而,有几个因素会影响磁力计读数:
- 硬铁效应:由车辆上的永磁体或磁化材料(如发动机)引起。这些效应会在各个方向上产生恒定的偏心。
- 软铁效应:由扭曲磁场的物质(例如镜架的金属部件)引起。这些物质会造成方向相关的扭曲。
- 外部干扰:来自电源线、金属结构等。
校准过程计算偏移值来补偿这些失真,确保航向数据的准确性。
校准工作流程
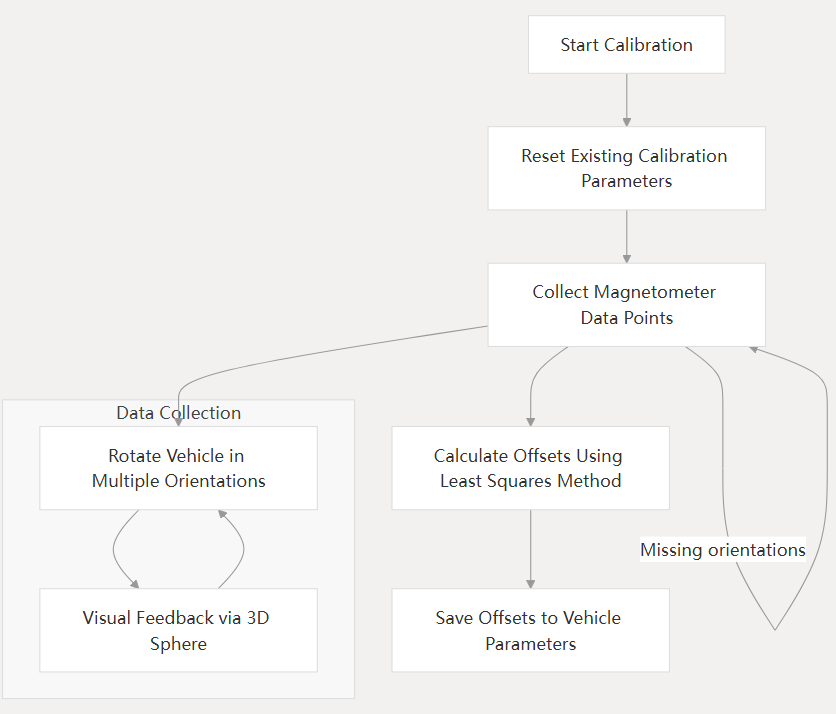
校准方法
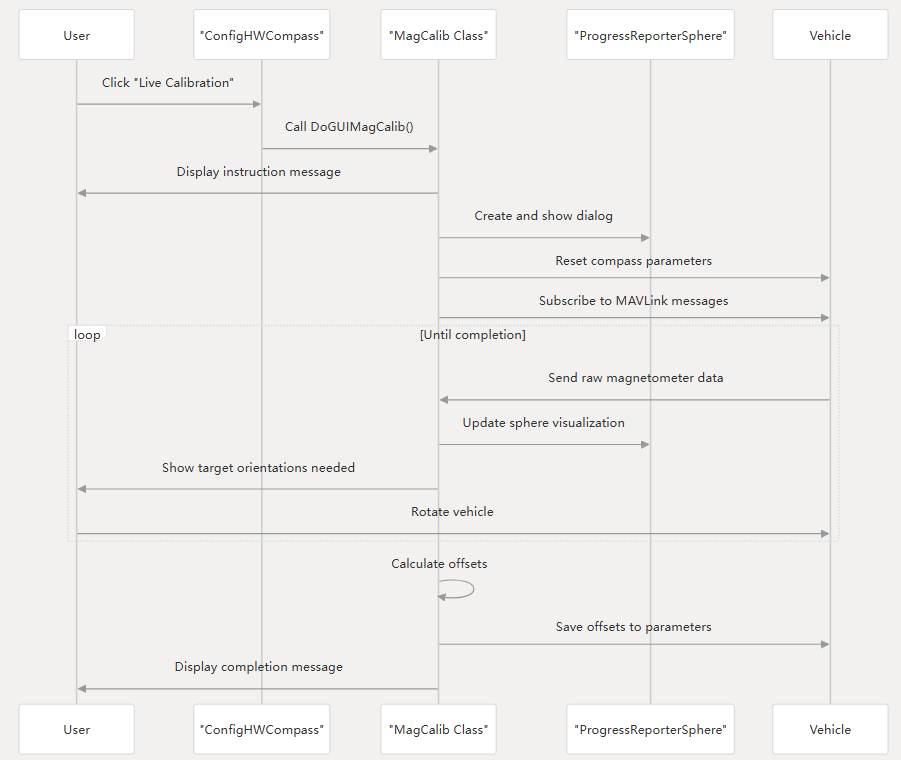
1. 实时 GUI 校准
该方法使用来自车辆的实时数据进行校准,同时通过 3D 表示提供视觉反馈。
如何使用:
- 连接到您的车辆
- 导航至设置>必备硬件>指南针
- 点击实时校准
- 按照屏幕上的说明旋转车辆
2. 基于对数的校准
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 7364
7364

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









