




概述
Mission Planner 中的航点管理功能允许操作员通过定义车辆将遵循的特定点和命令来创建自动驾驶车辆的飞行路径。该系统支持各种航点类型、参数配置和任务操作。
航点数据结构
Mission Planner 中的航点采用结构化格式表示,包含位置、高度和命令参数。该系统支持 GPS 坐标和命令操作。
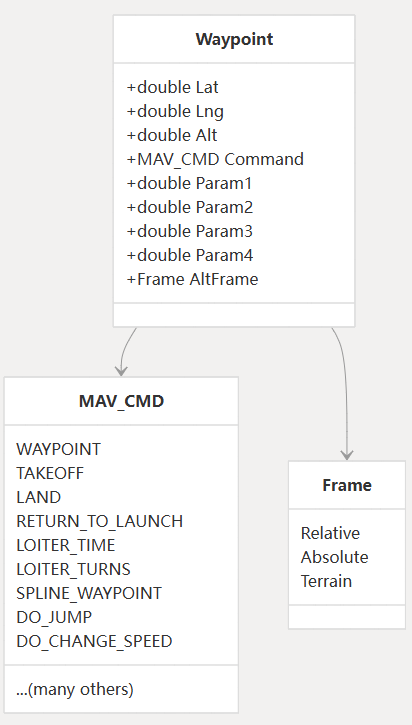
每个航点都包含几个关键组成部分:
- Lat/Lng/Alt:地理位置和海拔
- 命令:要执行的操作类型(例如,基本航点、起飞、降落)
- 参数:四个附加参数,其含义因命令类型而异
- 框架:指定如何解释高度(相对于家,绝对或地形跟随)
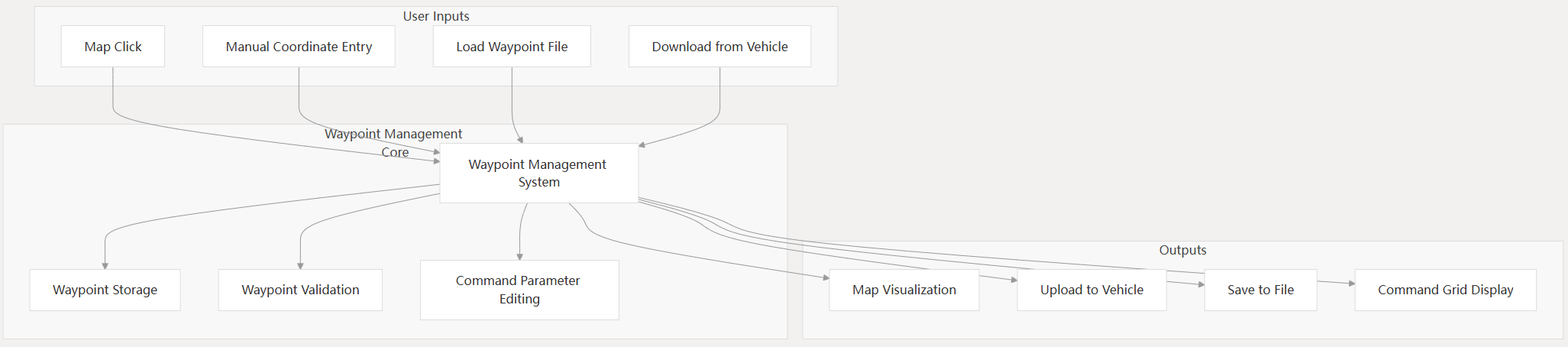
用户界面组件
航点管理主要通过任务规划器中的飞行规划器视图进行处理,其中包括几个关键界面元素:
| 成分 | 描述 |
|---|---|
| 地图显示 | 用于可视化和添加航点的交互式地图 |
| 命令网格 | 所有航点和参数的表格视图 |
| 命令选项 | 用于配置特定航点属性的字段 |
| 动作按钮 | 用于读取/写入车辆航点的控制 |
| 海拔设置 | 新航点的默认高度配置 |
添加航点
可以通过多种方法将航点添加到任务中:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3341
3341

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









