







第四章:Intel RealSense D455深度相机驱动安装与运行
本实验需要用到的硬件设备:
ur10e机器人 (其他型号)、windows电脑、Intel RealSense D455 深度相机 (其他型号)
网线、usb数据线(用来连接安卓手机)、usb3.0数据线(连接深度相机)
这是一个系列其中包含:
1.在VMware虚拟机中安装Ubuntu环境、ROS环境
2.安装UR驱动(用来连接UR真机)
3.安装MoveIt(用来控制UR10e机器人)
4.安装realsense的驱动
5.安装Aruco码驱动
6.手眼标定全实验过程
先说下目前所需工具的版本:
1.VMware Workstation Pro 17
2.Ubuntu 20.04
3.ROS Noetic Ninjemys
4.universal-robot-noetic-devel
5.librealsense2
上篇内容:
上篇+补充: 我们配置了UR机器人的urdf并生成了对应的moveIt!,并且连接了真实的ur10e机器人,在rviz可视化中让其成功动了起来。
如有需要可自行点击下方链接回到第三章:
《第三章》安装MoveIt并通过universal_robot生成UR10e机器人urdf模型及其yaml参数配置(ur10e手眼标定实验实机演示)_ur10机器人参数-优快云博客
一、安装最新的IntelRealSense SDK2.0
(1) 更新安装包
sudo apt-get update && sudo apt-get upgrade && sudo apt-get dist-upgrade
(2) 注册服务器的公钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
(3) 将服务器添加到存储库列表中
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
(4) 安装SDK2的依赖
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
(5) 安装realsense-ros的依赖
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg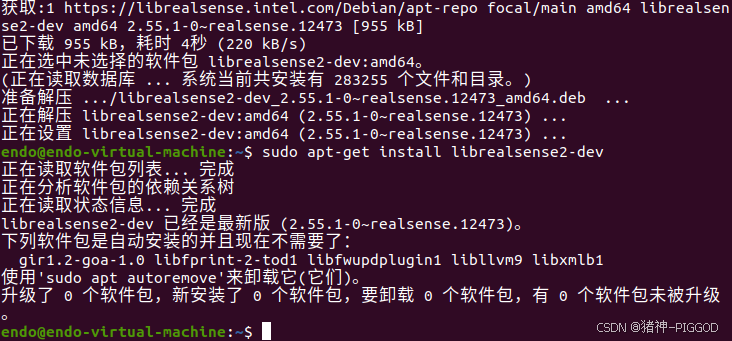
二、测试相机的连接
1.连接相机请注意选择USB3.0的接口
一般是这种蓝色的接口,或者SS标识是3.0接口

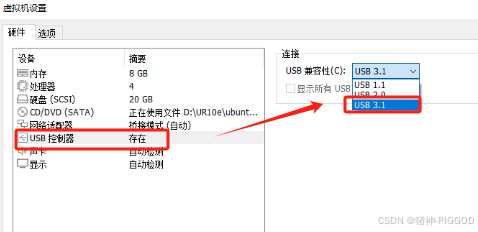
2.修改VMware设置
找到虚拟机 > 设置

将USB控制器选择"USB3.1"(只要大于等于3.0就行)
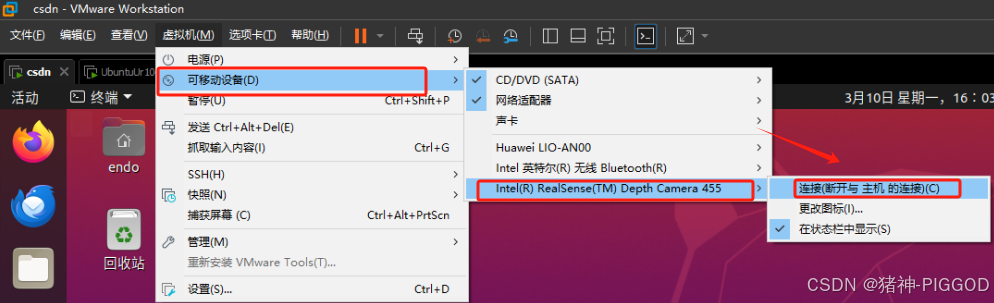
3.虚拟机连接相机
虚拟机 > 可移动设备 > 选择你的相机 > 连接
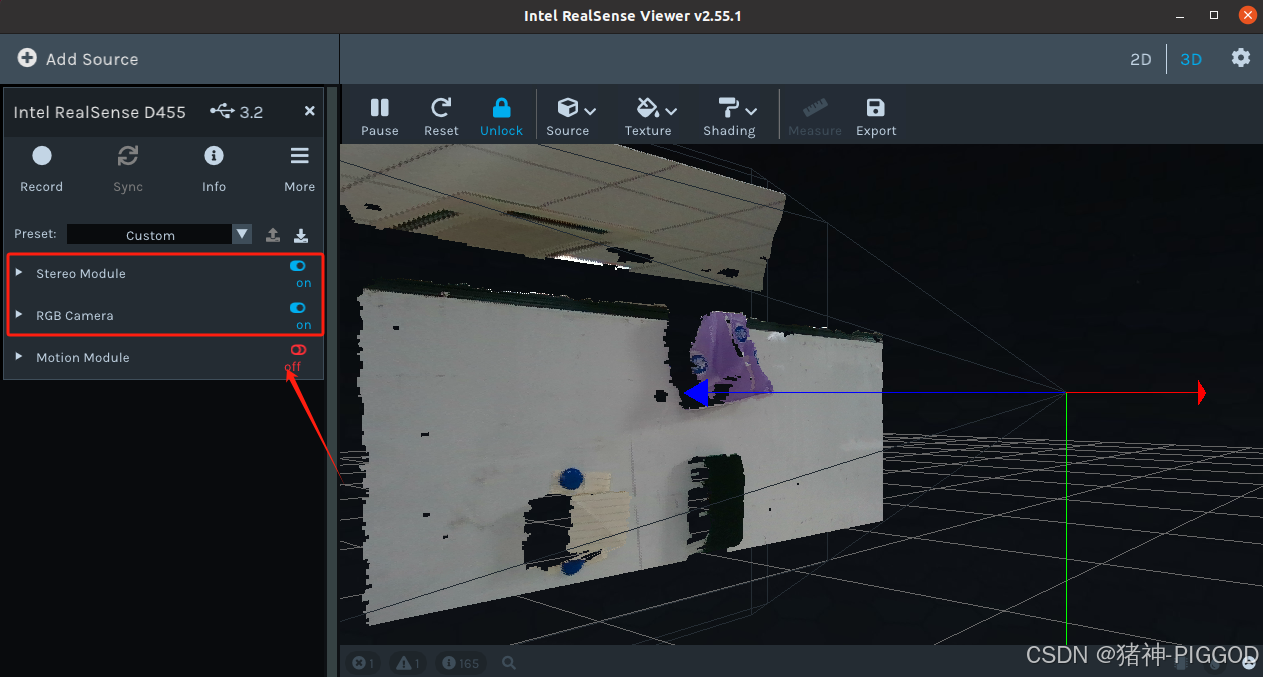
4.测试相机的连接,启动realsense-viewer
realsense-viewer
可以看到相机已成功连接了
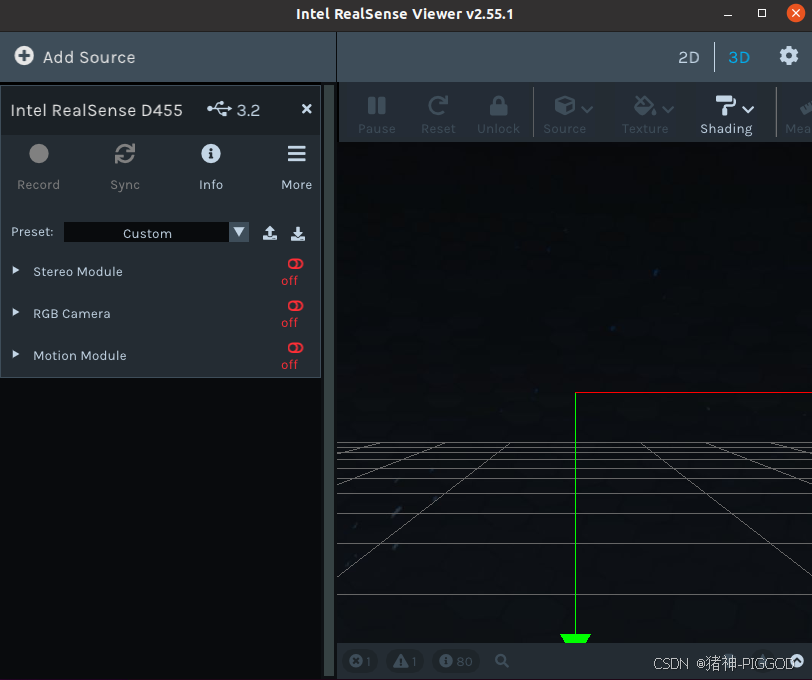
依次打开Stereo Module和RGB Camera两个开关就可以看到深度图像了
(注意要先打开Stereo Module)
三、安装realsense-ros
注意前面的两个依赖已经成功安装了
1.我们先cd到工作空间下
cd catkin_ws/src/
2.下载插件
git clone https://github.com/IntelRealSense/realsense-ros.git
3.安装依赖(其中的noetic换成自己的ros版本)
sudo apt-get install ros-noetic-ddynamic-reconfigure
安装成功!
4.编译运行
cd catkin_ws/
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
5.安装到本机
catkin_make install四、启动深度相机
1.启动RGB-D相机
先安装ros软件包rgbd_launch
sudo apt install ros-noetic-rgbd-launch
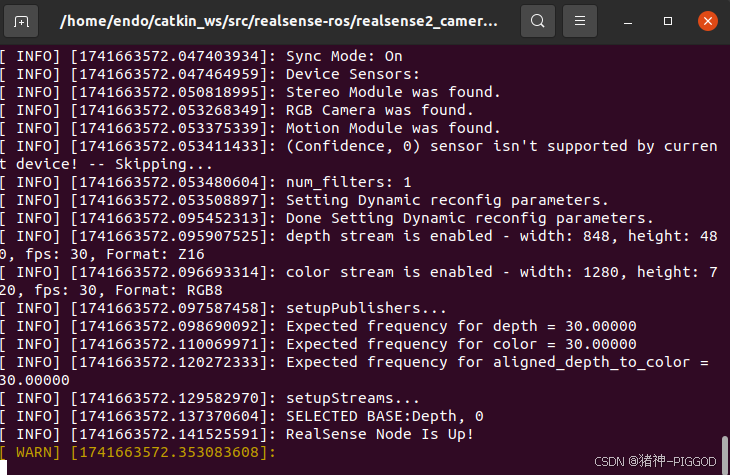
2.启动相机
在工作空间的目录下打开终端输入:
source devel/setup.bash
roslaunch realsense2_camera rs_rgbd.launch成功启动
3. 可视化相机数据
新打开一个终端
终端输入:
rosrun rqt_image_view rqt_image_view //启动ros自带的imge可视化节点就打开了可视化界面
我们选择 /camera/color/image_raw,就可以看见RGB图像了
总结:
1.安装了realsense最新版的SDK2.0
2.成功连接了realsense并看到了画面
3.安装realsense-ros(为手眼标定做准备)
下一篇将安装剩下的所有插件,比如aruco_ros、vision_visp和easy_handeye插件。然后就可以正式的开启手眼标定实验了。
免责声名:
一切均严格参照各类工具开源策略,没有任何侵权意图,本文章全由自己编写,如出现任何问题请联系我,我将删除。


















 287
287

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









