



基于matlab的扩展卡尔曼滤波(Extended Kalman Filter,EKF),通过卡尔曼滤波算法近似计算系统的状态估计值和方差估计值,对信号进行滤波。 程序已调通,可直接运行。 程序保证可直接运行。
在信号处理的领域中,扩展卡尔曼滤波(Extended Kalman Filter,EKF)是一种极为有用的工具,它能帮助我们对非线性系统的状态进行有效的估计。今天就来聊聊基于Matlab实现EKF对信号进行滤波的过程。
EKF原理简述
EKF本质上是卡尔曼滤波在非线性系统中的拓展。卡尔曼滤波主要是通过预测和更新两个步骤,不断地优化系统状态估计值和方差估计值。而在非线性系统里,我们没办法直接使用传统卡尔曼滤波的线性模型,所以EKF通过对非线性函数进行一阶泰勒展开近似线性化,以此来应用卡尔曼滤波的框架。简单来说,就是在每个时刻对系统的非线性模型进行局部的线性近似,从而能够像传统卡尔曼滤波那样计算状态估计和方差估计。
Matlab 代码实现
% 模拟非线性系统参数设置
dt = 0.01; % 时间步长
A = [1 dt; 0 1]; % 状态转移矩阵
H = [1 0]; % 观测矩阵
Q = [0.001 0; 0 0.001]; % 过程噪声协方差
R = 0.1; % 观测噪声协方差
% 初始化状态和协方差
x_hat = zeros(2,1); % 初始状态估计
P = eye(2); % 初始协方差估计
% 模拟生成真实状态和观测数据
N = 1000; % 数据点数量
x_true = zeros(2,N);
z = zeros(1,N);
x_true(:,1) = [0; 0];
for k = 2:N
x_true(:,k) = A * x_true(:,k-1) + sqrtm(Q) * randn(2,1); % 生成真实状态
z(k) = H * x_true(:,k) + sqrt(R) * randn; % 生成观测数据
end
% EKF 实现
x_hat_hist = zeros(2,N);
x_hat_hist(:,1) = x_hat;
for k = 2:N
% 预测步骤
x_hat_minus = A * x_hat;
P_minus = A * P * A' + Q;
% 计算卡尔曼增益
K = P_minus * H' / (H * P_minus * H' + R);
% 更新步骤
x_hat = x_hat_minus + K * (z(k) - H * x_hat_minus);
P = (eye(2) - K * H) * P_minus;
x_hat_hist(:,k) = x_hat;
end
% 绘图展示
figure;
subplot(2,1,1);
plot(1:N, x_true(1,:), 'b', 'DisplayName', 'True State');
hold on;
plot(1:N, x_hat_hist(1,:), 'r--', 'DisplayName', 'Estimated State');
legend;
xlabel('Time step');
ylabel('State value');
title('Estimation of State 1');
subplot(2,1,2);
plot(1:N, x_true(2,:), 'b', 'DisplayName', 'True State');
hold on;
plot(1:N, x_hat_hist(2,:), 'r--', 'DisplayName', 'Estimated State');
legend;
xlabel('Time step');
ylabel('State value');
title('Estimation of State 2');代码分析
- 参数设置部分:
-dt定义了时间步长,这在离散化系统中非常关键,它决定了每次迭代之间的时间间隔。
-A是状态转移矩阵,描述了系统从一个时刻到下一个时刻状态的线性变化关系。这里A = [1 dt; 0 1]适用于简单的匀加速模型,第一行表示位置的更新与前一时刻位置和速度有关,第二行表示速度的更新只与前一时刻速度有关(假设无加速度噪声干扰)。
-H观测矩阵用于将系统状态映射到观测空间。这里简单设置为[1 0],意味着我们只观测状态向量中的第一个元素(比如位置)。
-Q和R分别是过程噪声协方差和观测噪声协方差。Q描述了系统内部状态变化的不确定性,R则描述了观测过程中引入的噪声大小。
- 初始化部分:
-x_hat初始状态估计设为零向量,P初始协方差估计设为单位矩阵。这是一种常见的初始设置,因为在没有任何先验信息时,我们假设初始状态为零且不确定性为单位矩阵所表示的均匀分布。
- 数据生成部分:
- 通过循环生成N个时间步的真实状态x_true和观测数据z。真实状态通过状态转移矩阵A以及过程噪声sqrtm(Q) randn(2,1)得到更新。观测数据则是在真实状态基础上通过观测矩阵H并添加观测噪声sqrt(R)randn生成。
- EKF 主体实现部分:
- 预测步骤:根据前一时刻的状态估计xhat和协方差估计P,利用状态转移矩阵A预测当前时刻的状态xhatminus和协方差Pminus。
- 计算卡尔曼增益:根据预测的协方差Pminus、观测矩阵H和观测噪声协方差R计算卡尔曼增益K。这个增益决定了观测数据对状态估计更新的权重。
- 更新步骤:利用卡尔曼增益K、观测数据z(k)和预测状态xhatminus更新状态估计xhat和协方差P。
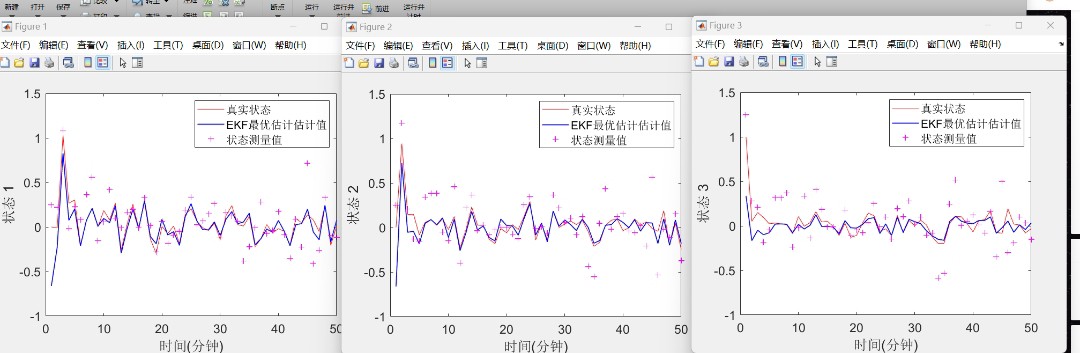
- 绘图部分:
最后通过Matlab的绘图函数,将真实状态和估计状态绘制在同一张图上,直观地展示EKF对系统状态的估计效果。
通过这样一个基于Matlab的EKF实现,我们可以有效地对非线性系统信号进行滤波和状态估计。希望这篇博文能帮助大家更好地理解和应用EKF。

















 1272
1272

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









