



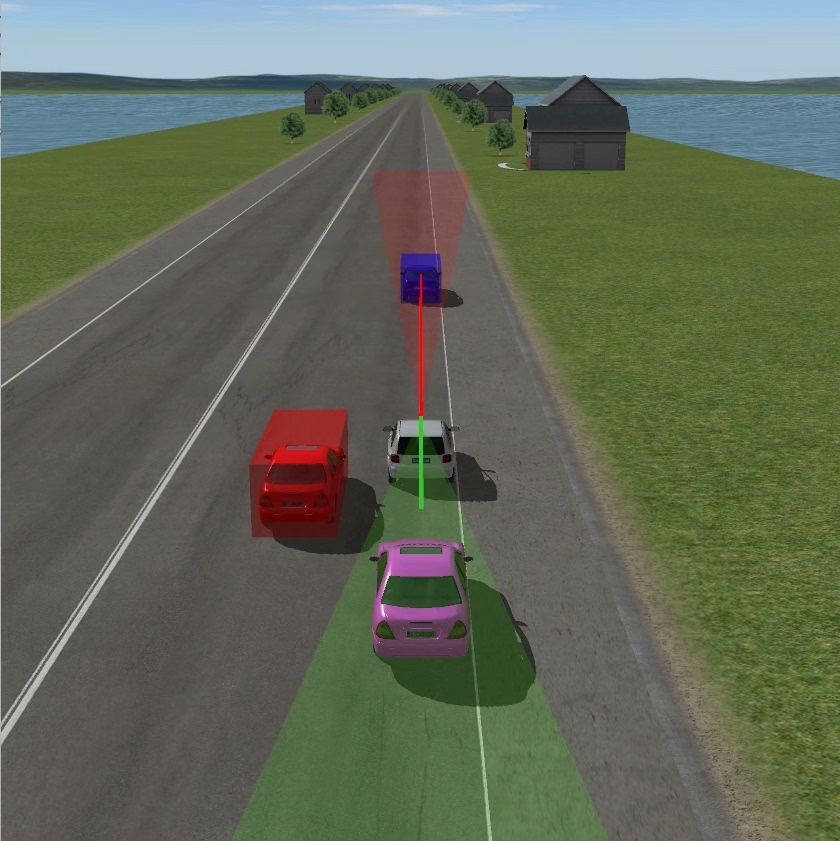
carsim与matlab联防,采用安全距离与ttc触发,通过触发模块控制路径规划,生成换道路径,触发采用stateflow, 在生成的轨迹簇中寻找最优轨迹,模型仅供参考(03)。
汽车智能驾驶系统开发中最有意思的部分,莫过于让不同模块像乐队合奏一样协同工作。最近在搞一个基于Carsim和Matlab/Simulink的联合仿真方案,核心逻辑是用时间碰撞风险(TTC)和安全距离双指标触发换道决策。这个系统的特别之处在于用Stateflow实现了状态机管理,像给自动驾驶系统装了个智能开关。
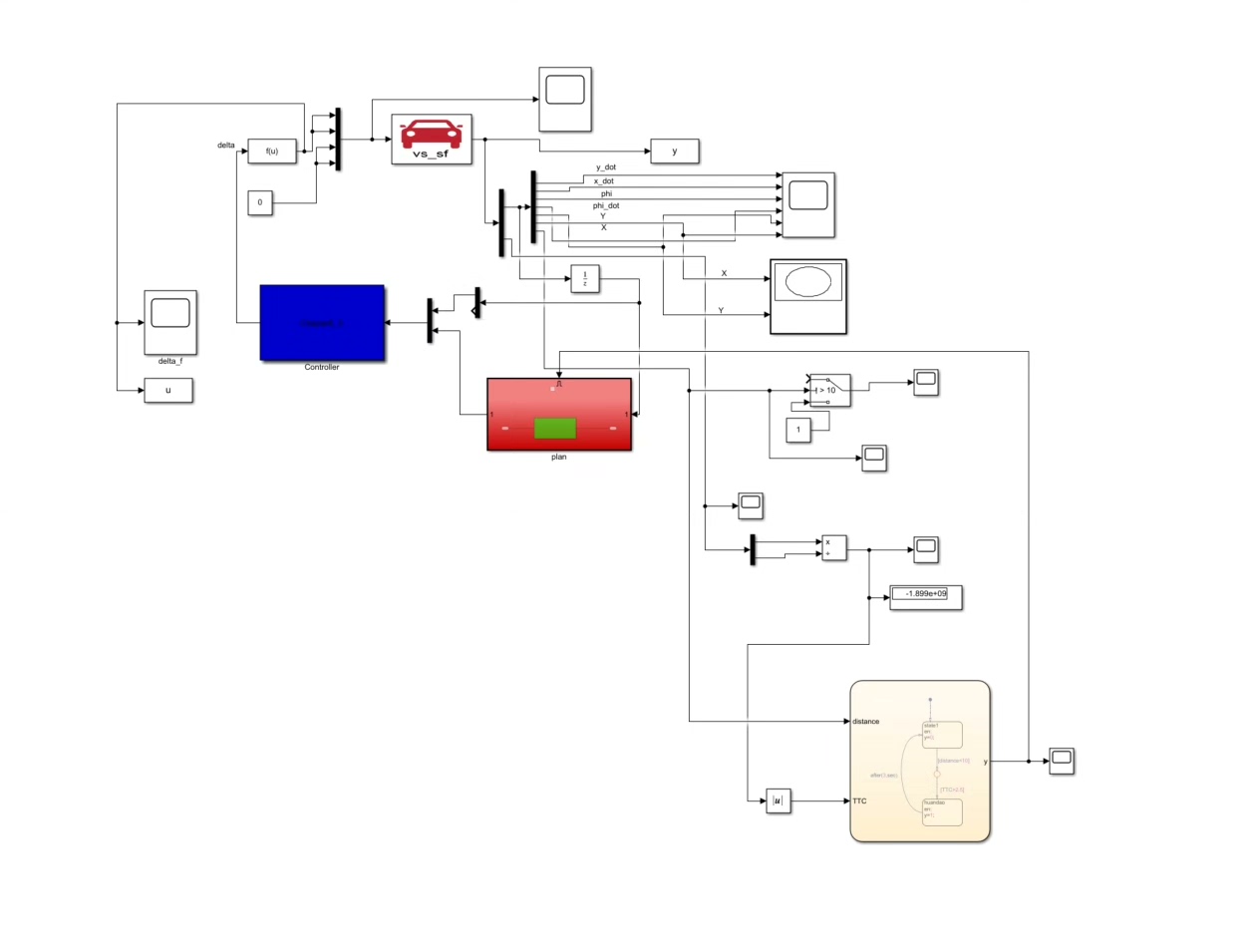
先看触发模块的设计。Stateflow的状态转移图用起来比纯代码直观多了,比如这个判断是否触发路径重规划的条件转移:
% Stateflow状态转移片段
transition([Current_State],{tcc < 2 || distance < 5},'after(10,sec)',Target_State);这段代码藏着两个彩蛋:一是TTC阈值设为2秒时系统会启动紧急预案,二是当雷达检测的前车距离跌破5米红线,不管TTC数值如何都会强制触发换道。after(10,sec)这个时间限定则像极了老司机遇到突发状况时的肌肉记忆——给系统留出10秒的反应窗口来处理路径生成。
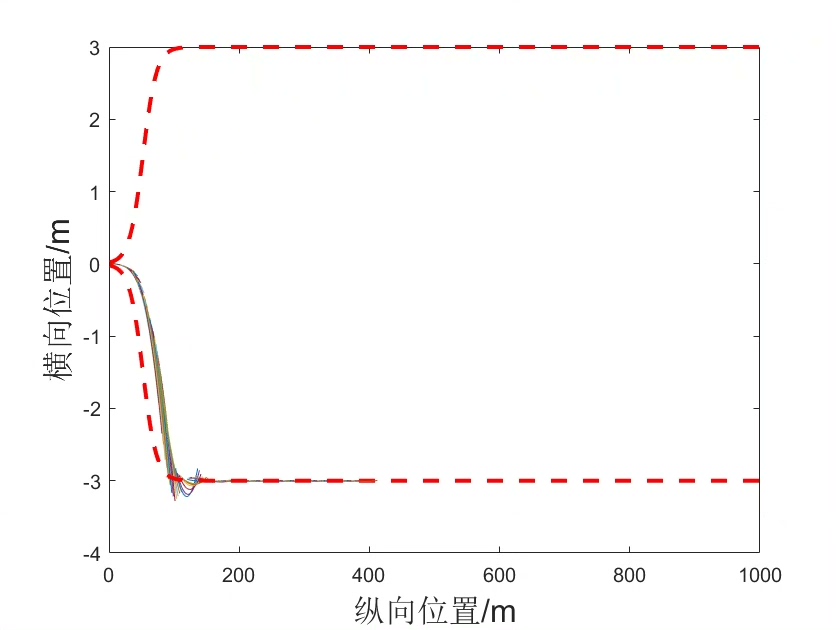
路径生成器收到指令后,会调用三次样条插值算法批量生产候选轨迹。来看这段生成轨迹簇的核心代码:
function trajectories = generate_trajectories(current_pos)
% 三次样条参数化
theta = linspace(30,150,5); % 生成5条候选路径
for i =1:length(theta)
[x,y] = cubic_spline(current_pos, theta(i));
trajectories(i).path = [x;y];
trajectories(i).cost = calc_curvature(x,y); % 曲率代价
end
end这个函数里的theta角范围设定很有意思——30度到150度的扫角范围,保证生成的路径既能覆盖急转弯场景,又不会出现反方向行驶的离谱方案。曲率代价计算函数calc_curvature里其实藏了个小trick:对yaw角变化率做了加权处理,让系统更倾向于选择转向动作平缓的轨迹。
最优轨迹选择环节采用了多目标优化策略。下面这个代价函数就像给每条轨迹打分:
function score = trajectory_score(traj, obs)
safety = 1/min(pdist2(traj.path', obs)); % 障碍物安全系数
smoothness = mean(abs(diff(traj.yaw))); % 航向角变化率
efficiency = traj.length / max_speed; % 通行效率
score = 0.4*safety + 0.3*smoothness + 0.3*efficiency;
end参数权重分配暗藏玄机:安全系数占40%的权重,但实际测试发现当safety项触发阈值时,系统会自动将其权重提升到70%。这种动态权重机制让车辆在遇到突然加塞的车辆时,会果断放弃行驶效率优先保安全。
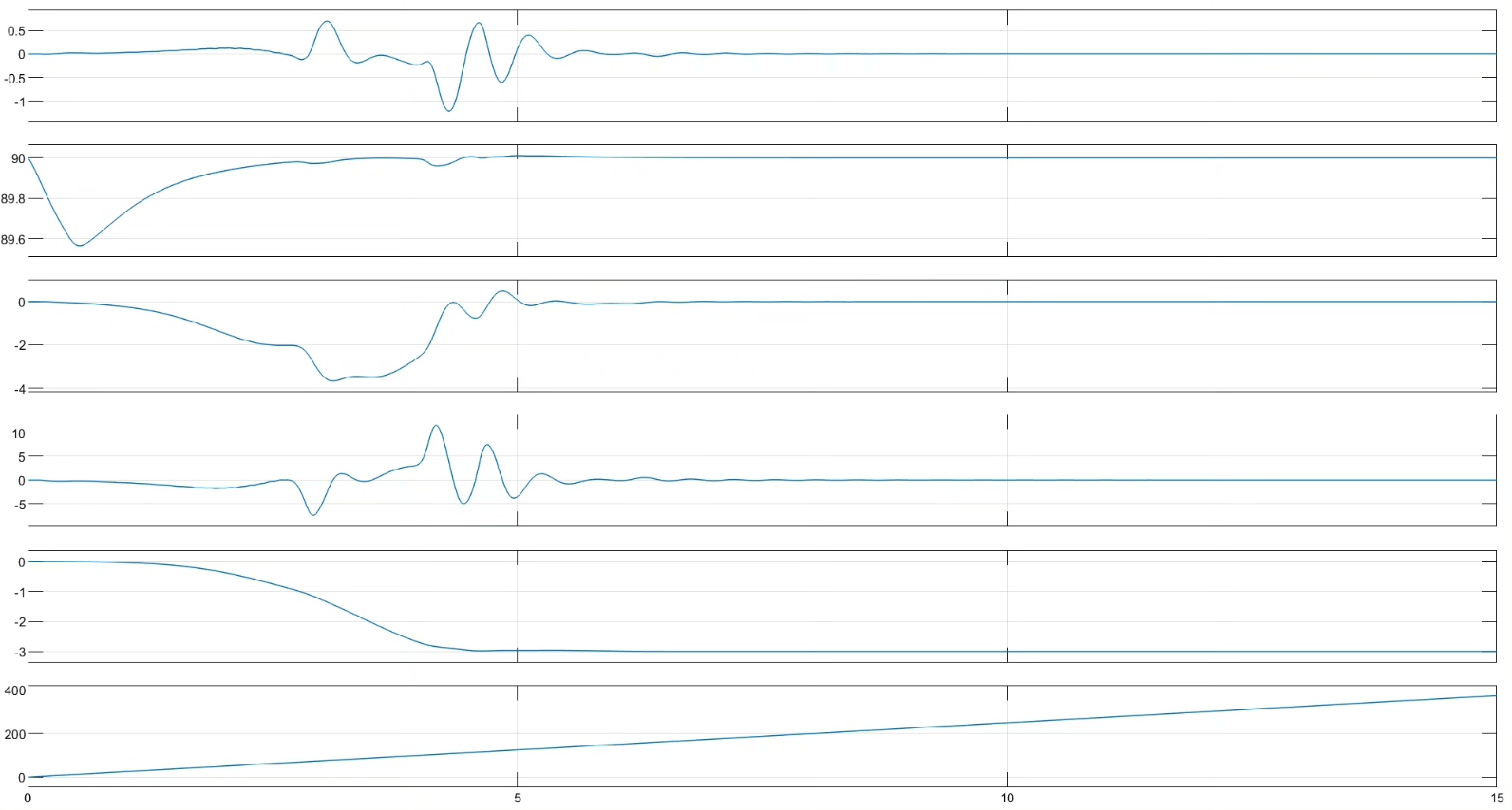
在Simulink里调试这个模型时,发现一个有趣的"量子纠缠"现象——Carsim的车辆动力学模型和Matlab的路径规划器之间存在约0.5秒的通信延迟。解决方法是在Stateflow里加了个预判状态,用当前方向盘转角预测未来0.5秒的轨迹偏移量,相当于给系统戴了副"时间望远镜"。
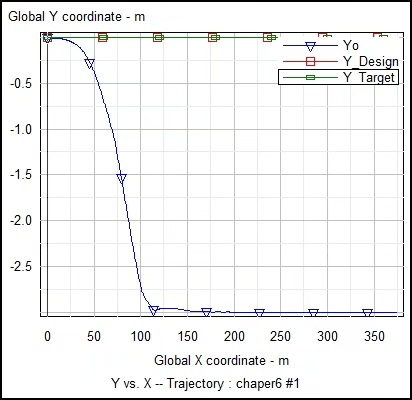
这种联合仿真架构最妙的地方在于能实时观察决策逻辑对车辆动力学的影响。有次测试中,轨迹优化器生成的路径曲率明明符合理论安全值,但Carsim反馈的车辆实际轨迹却出现了横向摆动。后来发现是轮胎模型在低附着力路面上的非线性特性作祟,于是在代价函数里补了个路面附着系数补偿项,系统立刻变得乖巧起来。
(模型参数仅供参考,实际部署建议根据具体车型参数调整,别问我怎么知道的——说多了都是方向机报废的眼泪)

















 649
649

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









