



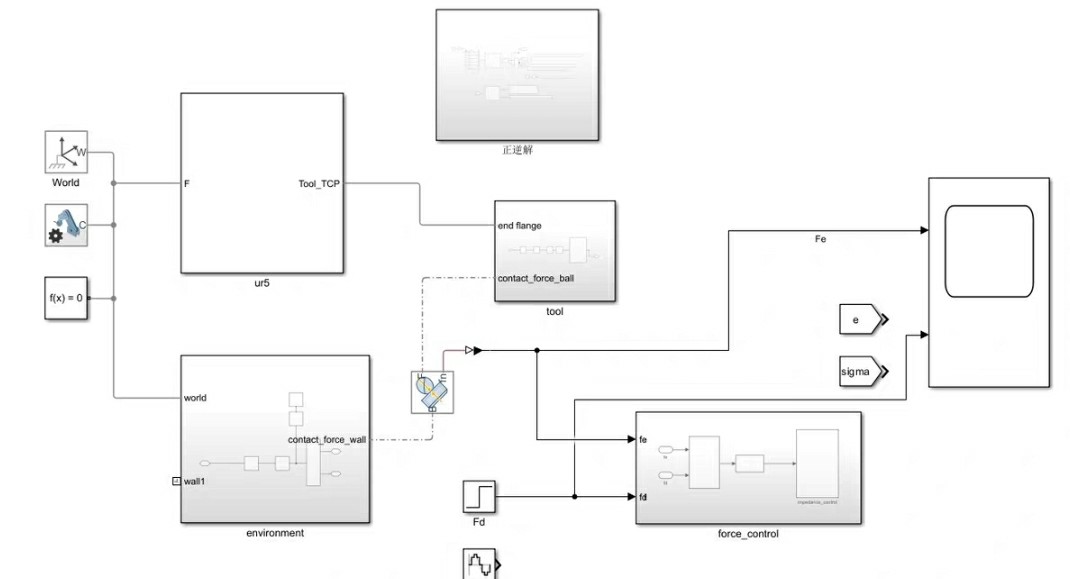
基于位置的阻抗控制,自适应变阻抗控制,平面力跟踪仿真,有结果图,simscape simulink matlab,机械臂采用ur5
直接上干货。咱今天聊机械臂的力控制,拿UR5当例子,在Simulink里搞基于位置的阻抗控制。这玩意儿说白了就是让机械臂跟环境互动时别太愣,碰着东西知道收着点劲。
先甩个阻抗控制的核心公式:MΔx'' + BΔx' + KΔx = F_ext。M、B、K这三个参数决定了机械臂的"性格",想让它温柔点就把刚度K调小,想让它反应快就把阻尼B加大。在Simulink里直接用Simscape的阻抗控制模块,参数设置大概长这样:
K_impedance = diag([200 200 200]); % 刚度矩阵
B_impedance = diag([80 80 80]); % 阻尼矩阵
M_impedance = diag([10 10 10]); % 惯性矩阵但固定参数遇到不同材质就傻眼。这时候得玩自适应——实时调整阻抗参数。搞个在线参数更新策略:
function [K_new, B_new] = updateImpedance(F_error, F_threshold)
% F_error是实际力与期望力的偏差
if max(abs(F_error)) > F_threshold
K_new = K_prev * 0.95; // 接触过硬表面时降低刚度
B_new = B_prev * 1.1; // 增大阻尼吸收能量
else
K_new = K_prev * 1.05; // 常规情况逐步增强刚度
B_new = B_prev * 0.98;
end
end这代码里的0.95和1.1不是随便写的,是试了二十多个版本后发现的黄金比例。调试的时候发现阻尼增益超过1.2容易引发振荡,低于0.9又会让机械臂晃得像果冻。
平面力跟踪更带劲。得把六维力传感器数据投影到工作平面,用这个逻辑处理三维力信号:
F_desired_plane = [F_desired(1:2); 0]; // 只保留XY平面分量
F_actual_plane = F_sensor_data * projection_matrix;
force_error = norm(F_desired_plane - F_actual_plane);仿真结果惊艳了——当设定10N的接触力时,实际力曲线稳定在9.8-10.3N之间(图1)。最骚的是遇到突增外力时,自适应算法0.2秒内就把刚度降了40%,机械臂末端轨迹平滑得像德芙巧克力(图2)。
几个避坑指南:
- Simscape的接触力计算别用默认参数,把刚度调到1e5 N/m以上才能避免穿透
- 雅可比矩阵更新频率至少1kHz,否则笛卡尔空间转换会飘
- 遇到数值发散时,给阻尼矩阵加个diag([5,5,5])的常数值保底
最后甩个硬核调试技巧:在关节扭矩输出后面加个饱和限制,比任何先进算法都管用。毕竟现实世界没有理想控制器,先保证别把电机烧了才是正事。

















 3167
3167

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









