




一、为什么要考虑这个问题:
手眼标定求出机械基座坐标系和相机坐标系的转换关系(眼在手外),但是D435I显然拥有多个相机坐标系,所以要考虑点云建立时使用的是哪一个坐标系。
二、实验
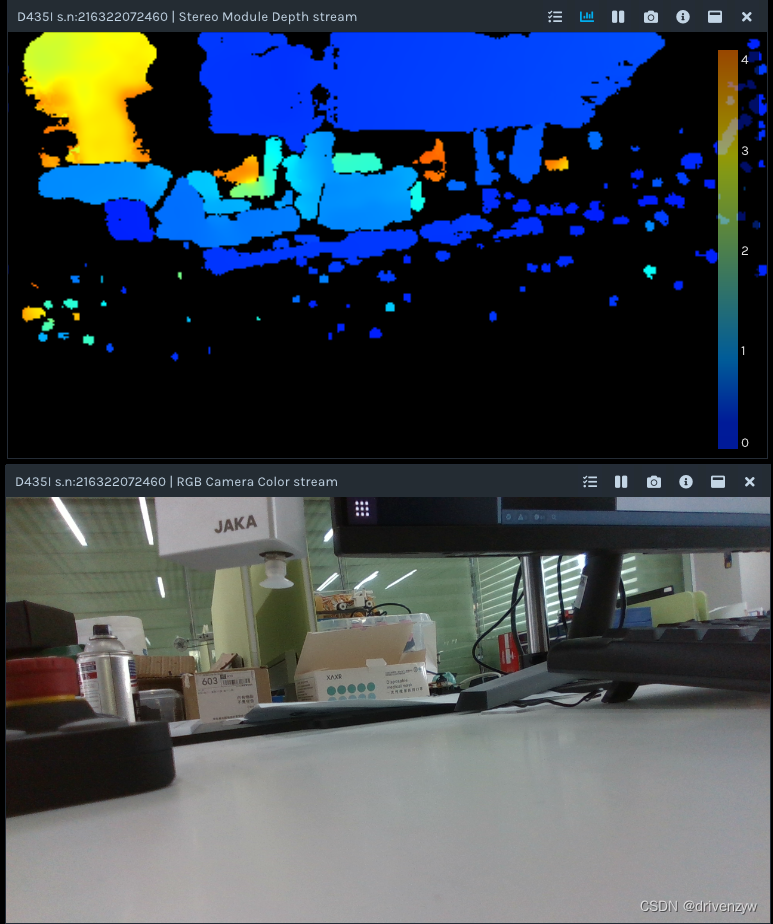
很明显,深度图和RGB图坐标不同
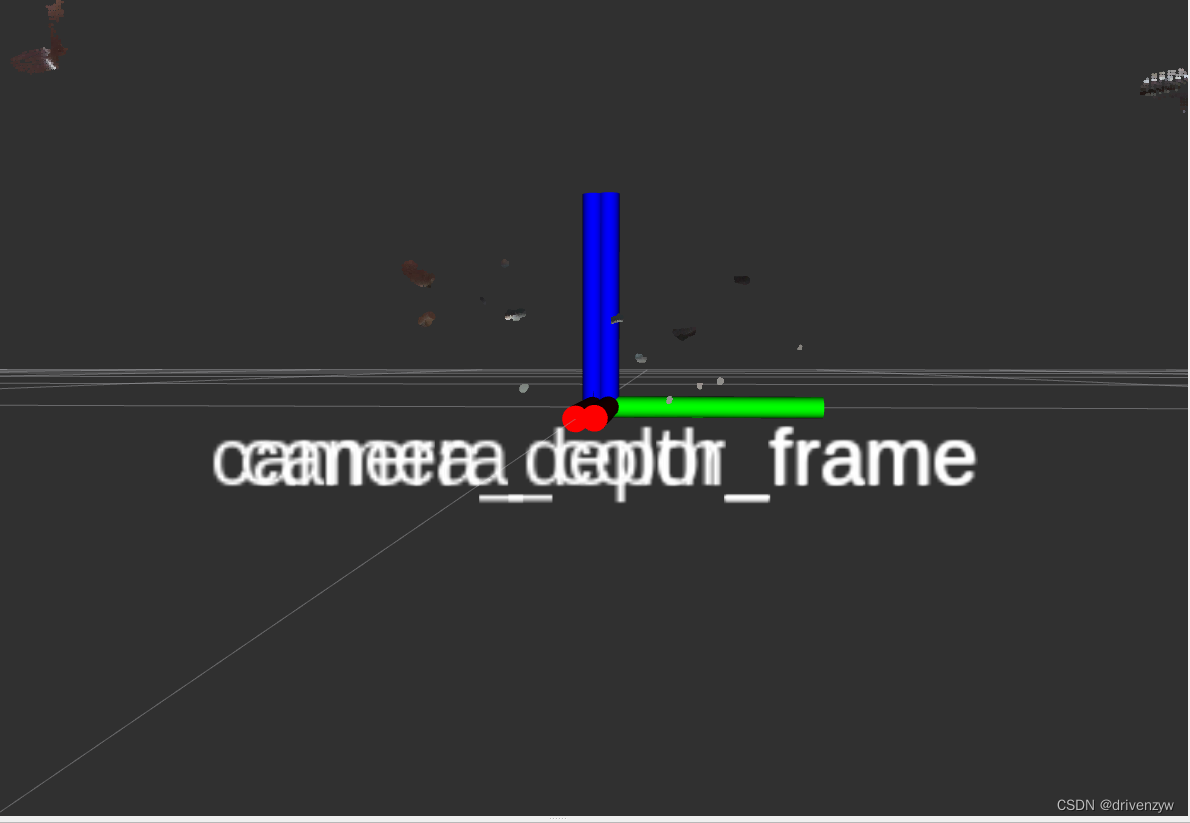
左边的是深度相机的坐标系
右边的是RGB相机的坐标系
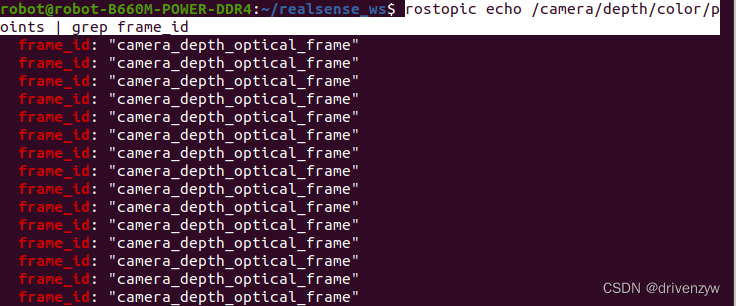
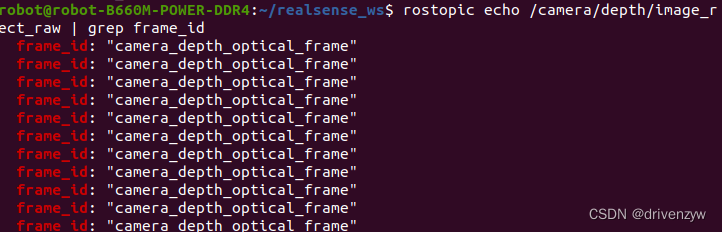
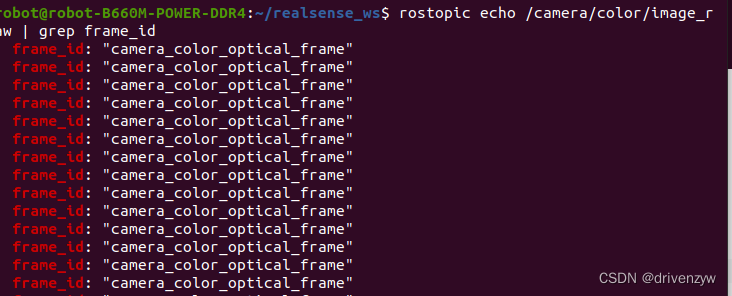
查看点云话题的坐标系
rostopic echo /camera/depth/color/points | grep frame_id
手眼标定求出机械基座坐标系和相机坐标系的转换关系(眼在手外),但是D435I显然拥有多个相机坐标系,所以要考虑点云建立时使用的是哪一个坐标系。
很明显,深度图和RGB图坐标不同
左边的是深度相机的坐标系
右边的是RGB相机的坐标系
查看点云话题的坐标系
rostopic echo /camera/depth/color/points | grep frame_id
 1658
1万+
6062
1658
1万+
6062

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























