




 该文介绍了如何在ROS环境中查看和标定相机内参,包括使用rostopic命令查看内参,通过rosdep安装标定工具,使用realsense2_camera.launch启动相机,然后用cameracalibrator.py进行11x9的标定过程。文章还提到点云话题不能用于内参标定,以及在使用camera_calibration过程中的一些注意事项。
该文介绍了如何在ROS环境中查看和标定相机内参,包括使用rostopic命令查看内参,通过rosdep安装标定工具,使用realsense2_camera.launch启动相机,然后用cameracalibrator.py进行11x9的标定过程。文章还提到点云话题不能用于内参标定,以及在使用camera_calibration过程中的一些注意事项。
1.查看内参
打开roscore和相机
输入:
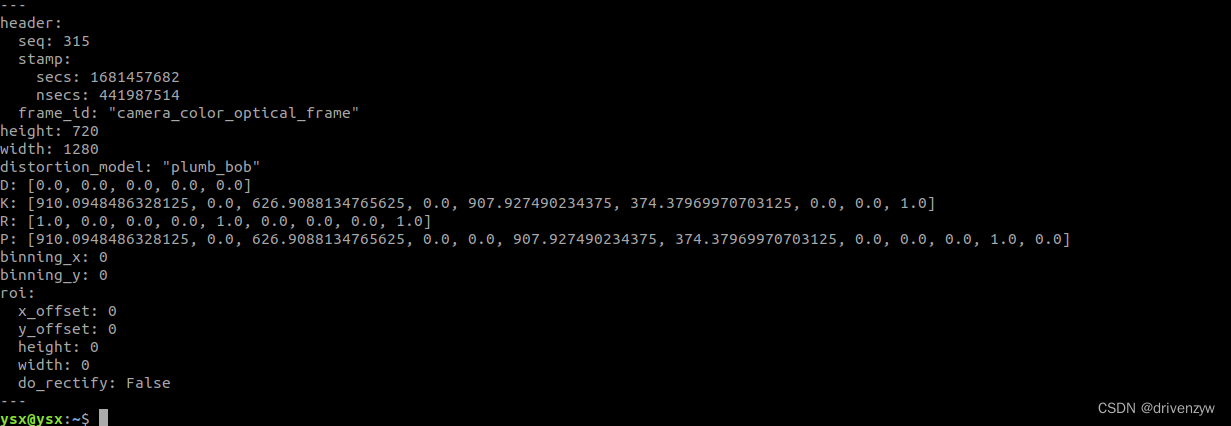
rostopic echo /camera/color/camera_info //查看相机内参
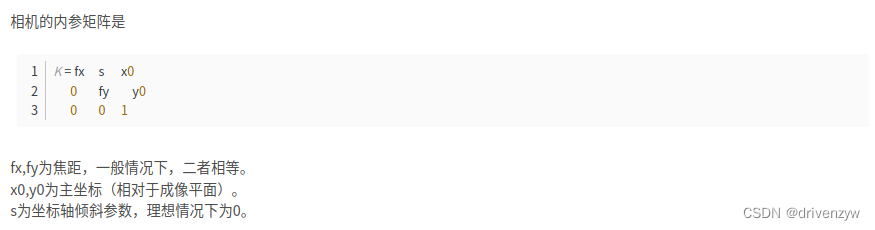
从而得到相机内参
2、标定内参
这里使用了ros自带的标定工具
1、先下载标定工具
//安装包
rosdep install camera_calibration
此处可能会需要update rosdep,如果更新成功就可以顺利安装标定工具,但是也可能遇到更新超时的情况。可以参考以下文章进行改良解决rosdep update失败问题 - 知乎
也可以使用sudo来进行安装(我没有试过),来源如下
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









