




一、概念
1.内参和外参
图和内容参考相机内参标定究竟标了什么?相机内参外参保姆级教程 - 知乎 (zhihu.com)
(14条消息) 相机模型-----内参、外参、标定、例子_相机内参数矩阵举例_纳百川@容苍穹的博客-优快云博客
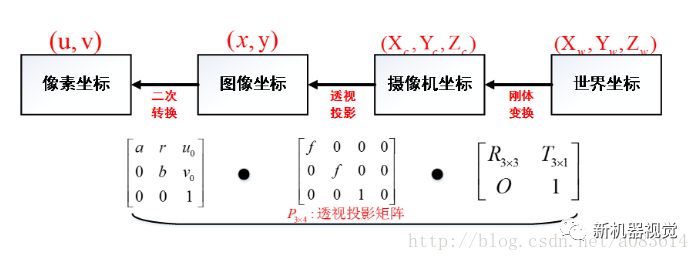
图1
了解标定,先要明白图像处理中的四个坐标系(14条消息) 图像处理——4个坐标系及相关转换图像像素坐标系 图像物理坐标系 相机坐标系 世界坐标系_MengYa_DreamZ的博客-优快云博客
相机内参的标定是为
图和内容参考相机内参标定究竟标了什么?相机内参外参保姆级教程 - 知乎 (zhihu.com)
(14条消息) 相机模型-----内参、外参、标定、例子_相机内参数矩阵举例_纳百川@容苍穹的博客-优快云博客
图1
了解标定,先要明白图像处理中的四个坐标系(14条消息) 图像处理——4个坐标系及相关转换图像像素坐标系 图像物理坐标系 相机坐标系 世界坐标系_MengYa_DreamZ的博客-优快云博客
相机内参的标定是为
 4160
1649
1621
6427
4160
1649
1621
6427

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























