




 文章详细描述了如何使用osg库中的TextureCubeMap和Camera在osgViewer环境中创建立方体贴图并打印为多个BMP文件,同时展示了与Shader的交互和图像处理过程。
文章详细描述了如何使用osg库中的TextureCubeMap和Camera在osgViewer环境中创建立方体贴图并打印为多个BMP文件,同时展示了与Shader的交互和图像处理过程。
越来越接近真相了。我们很自然地想到,如果把漫游器放在中心打印,是不是就可以打印整个等距柱状投影图了呢?是的,但是,只是要注意的是,立方体贴图的内部和外部尽管一样,但是还是稍微有点模糊,也可以在外部设置漫游器位置六次,打印六次,就像上节那样。但是,这里不考虑这些细节。
也就是把漫游器位置设置为
osg::Vec3d newEye(0, 0, 0);
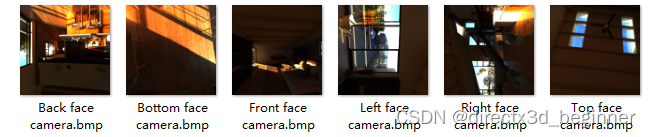
运行结果不出所料。
当然,也可以把osg::Image和osg::TextureCubeMap关联起来。使用osg::TextureCubeMap打印。即
int textureWidth = 512;
int textureHeight = 512;
osg::ref_ptr<osg::TextureCubeMap> texture = new osg::TextureCubeMap;
texture->setTextureSize(textureWidth, textureHeight);
texture->setInternalFormat(GL_RGB);
texture->setFilter(osg::Texture::MIN_FILTER, osg::Texture::LINEAR);
texture->setFilter(osg::Texture::MAG_FILTER, osg::Texture::LINEAR);
texture->setWrap(osg::Texture::WRAP_S, osg::Texture::CLAMP_TO_EDGE);
texture->setWrap(osg::Texture::WRAP_T, osg::Texture::CLAMP_TO_EDGE);
texture->setWrap(osg::Texture::WRAP_R, osg::Texture::CLAMP_TO_EDGE);
各个面关联,比如
camera->attach(osg::Camera::COLOR_BUFFER, texture, 0, osg::TextureCubeMap::POSITIVE_Y);
osg::ref_ptr<osg::Image> printImage = new osg::Image;
printImage->setFileName(camera->getName());
printImage->allocateImage(textureWidth, textureHeight, 1, GL_RGBA, GL_UNSIGNED_BYTE);
texture->setImage(0, printImage);
camera->attach(osg::Camera::COLOR_BUFFER, printImage);
打印时
int imageNumber = textureCubeMap->getNumImages();
for (int i = 0; i < imageNumber; i++)
{
osg::ref_ptr<osg::Image> theImage = textureCubeMap->getImage(i);
std::string strPrintName = "e:/" + theImage->getFileName() + ".bmp";
osgDB::writeImageFile(* theImage, strPrintName);
}
完整代码如下:
#include <osg/TextureCubeMap>
#include <osg/TexGen>
#include <osg/TexEnvCombine>
#include <osgUtil/ReflectionMapGenerator>
#include <osgDB/ReadFile>
#include <osgViewer/Viewer>
#include <osg/NodeVisitor>
#include <osg/ShapeDrawable>
#include <osg/Texture2D>
#include <osgGA/TrackballManipulator>
#include <osgDB/WriteFile>
static const char * vertexShader =
{
“in vec3 aPos;\n”
“varying vec3 outPos;”
“void main(void)\n”
“{\n”
“outPos = aPos;\n”
" gl_Position = ftransform();\n"
“}\n”
};
static const char *psShader =
{
“varying vec3 outPos;”
“uniform sampler2D tex0;”
"const vec2 invAtan = vec2(0.1591, 0.3183); "
"vec2 SampleSphericalMap(vec3 v) "
"{ "
" vec2 uv = vec2(atan(v.z, v.x), asin(v.y)); "
" uv *= invAtan; "
" uv += 0.5;
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 626
626

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









