




这是一个很好的问题!两台协作机器人(collaborative robots/cobots)都实现了拖动示教(drag teaching/direct teaching)功能,但它们的技术先进性可能存在显著差异。让我从几个技术维度来分析:
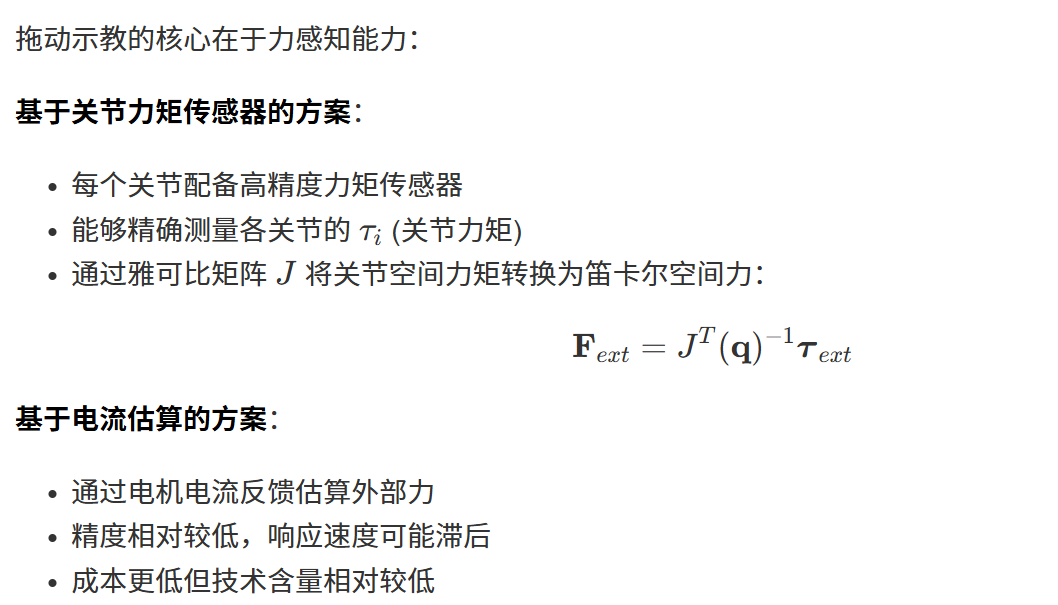
1. 力/力矩传感技术差异
2. 控制算法复杂度
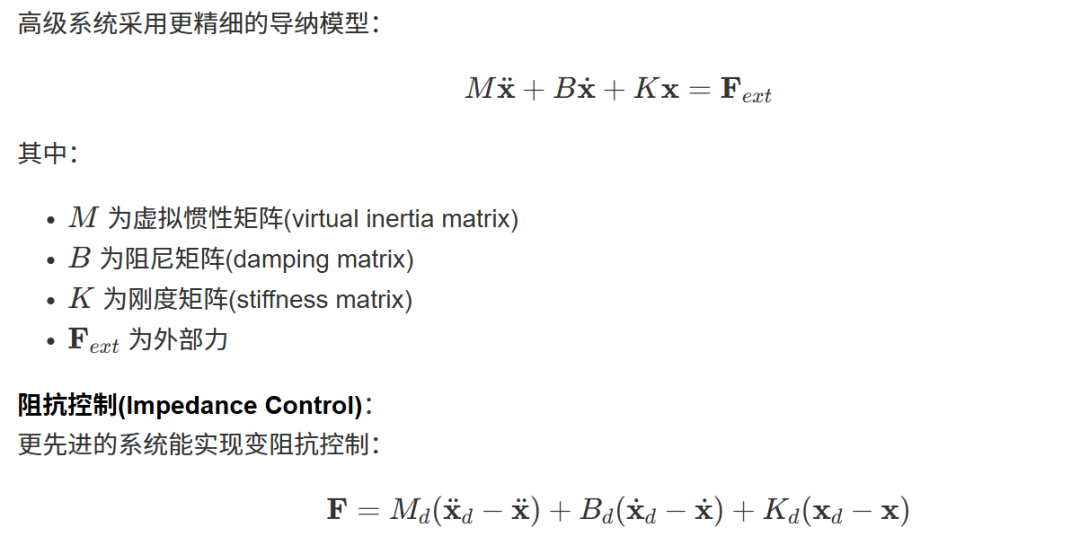
导纳控制(Admittance Control):
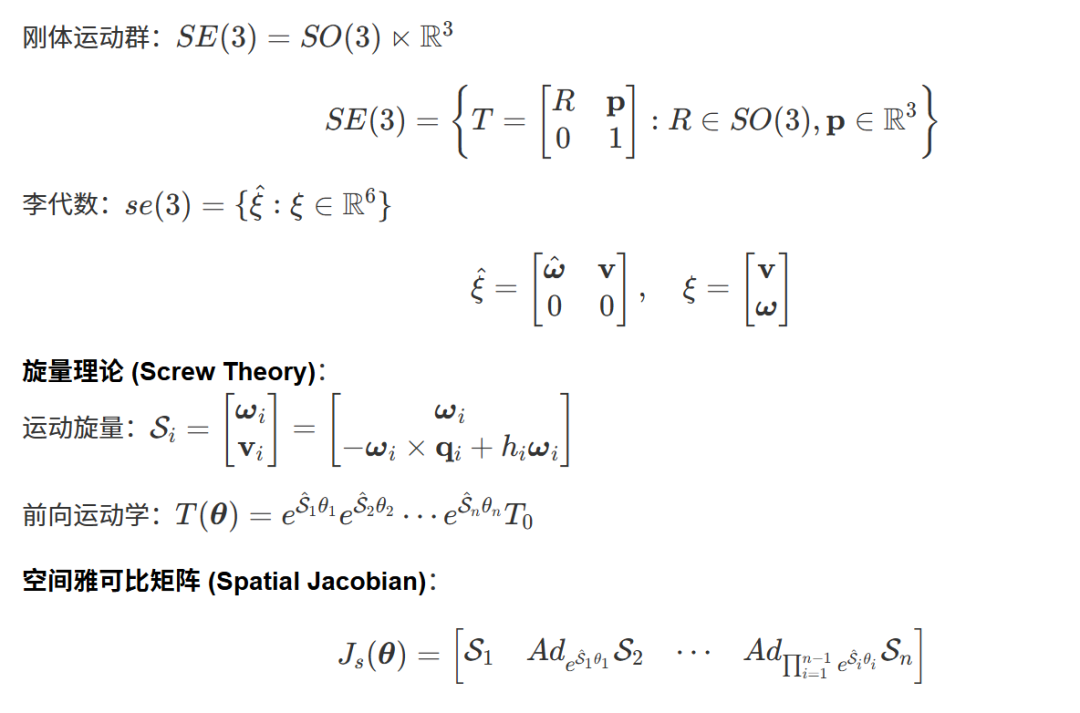
3. 运动学表达的先进性
4. 安全性实现层次
基础级别:简单的力阈值检测
先进级别:
多层安全架构
预测性碰撞检测
动态安全参数调整
符合ISO 10218标准的功能安全
5. 学习与适应能力
传统系统:固定参数的拖动示教
智能系统:
能学习操作者的示教意图
自适应调整导纳参数
基于机器学习优化轨迹
结论
即使都具备拖动示教功能,技术先进性可能差异巨大:
- 传感精度
:力传感器 vs 电流估算
- 控制精度
:精细化导纳/阻抗控制 vs 简单力反馈
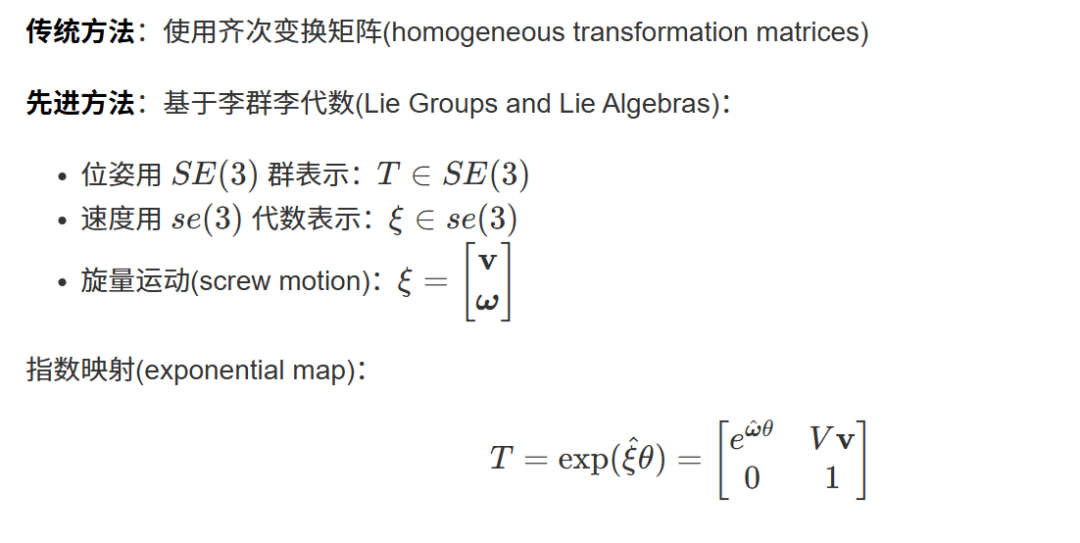
- 数学框架
:现代李群理论 vs 传统欧几里得方法
- 智能化程度
:自适应学习 vs 固定参数
- 安全等级
:多层防护 vs 基础保护
因此,看似相同的功能背后可能蕴含着完全不同层次的技术实现!
从理论和数学工具上区分可能的不同特点
从理论和数学工具的角度,拖动示教的实现可以体现出显著的技术层次差异。让我详细分析各个理论层面的区别:
1. 运动学建模理论层次
先进级别:现代微分几何方法
李群李代数框架 (Lie Group/Lie Algebra Framework):
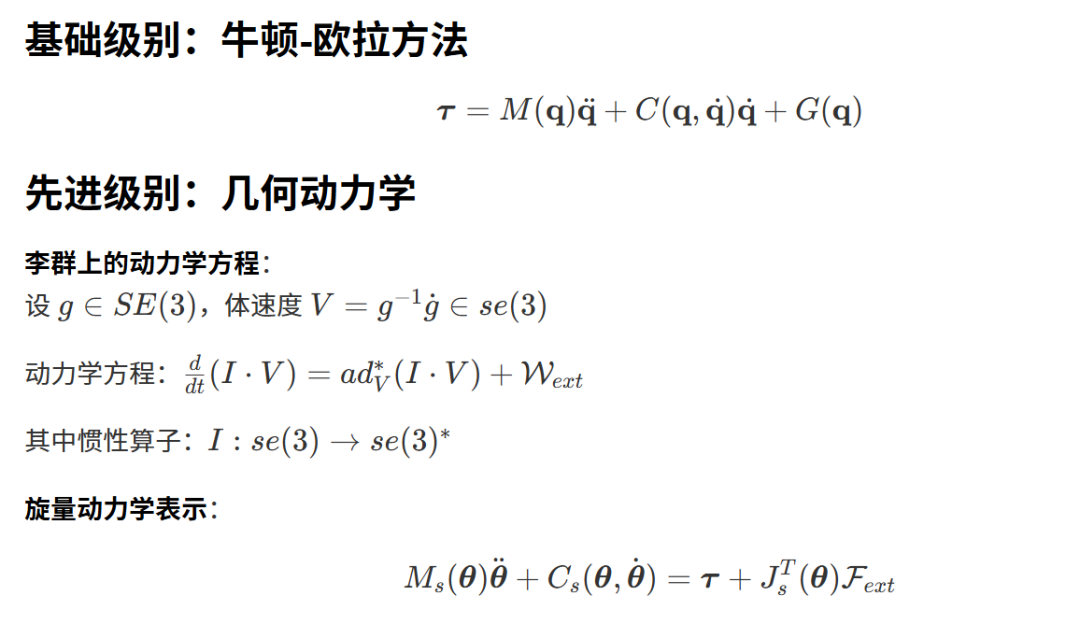
2. 动力学建模理论层次
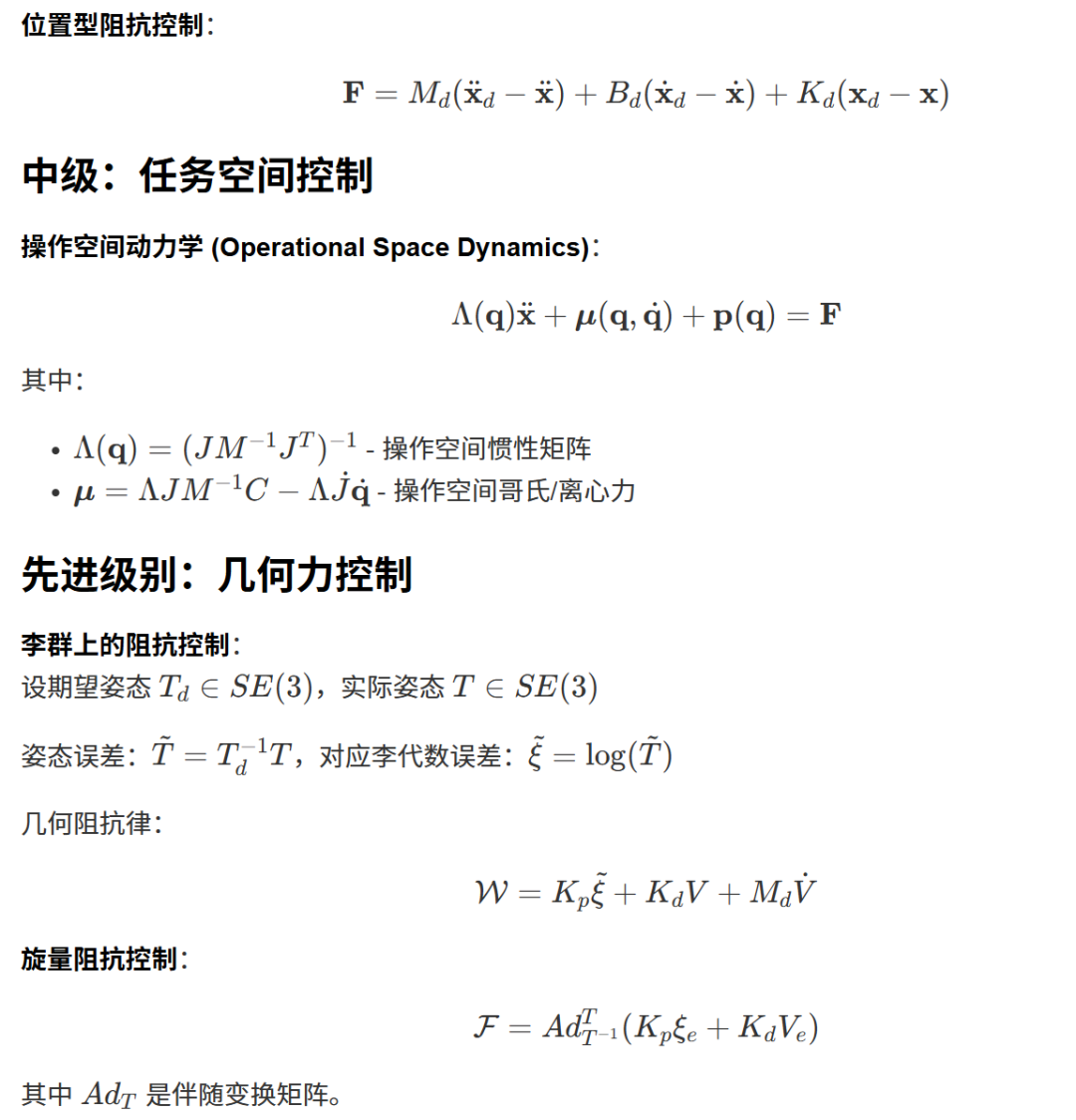
3. 力控制理论层次
基础级别:经典阻抗/导纳控制
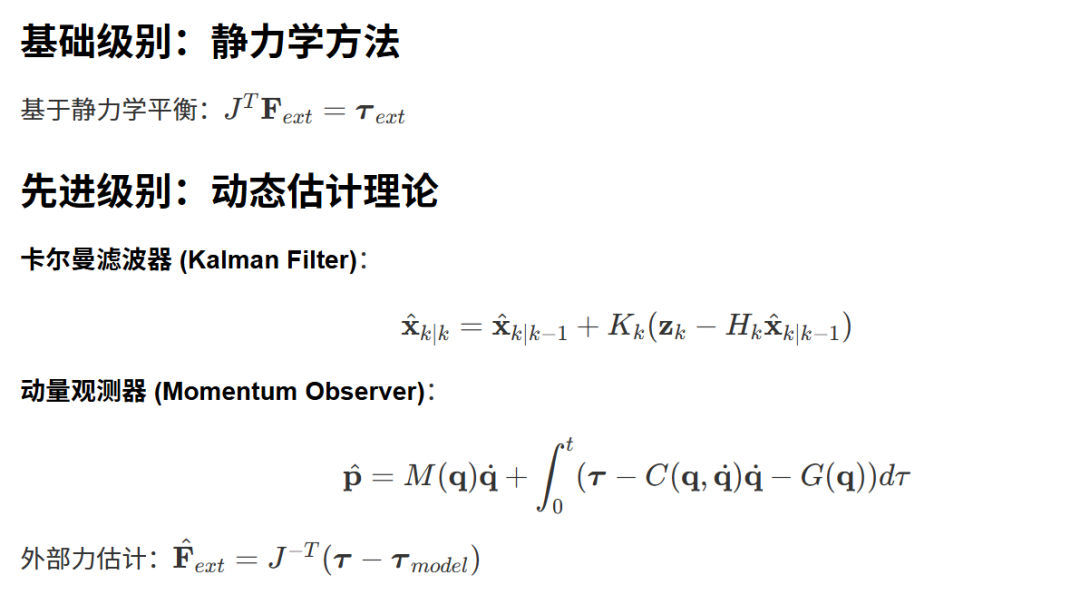
4. 感知与估计理论层次
5. 学习与适应理论层次
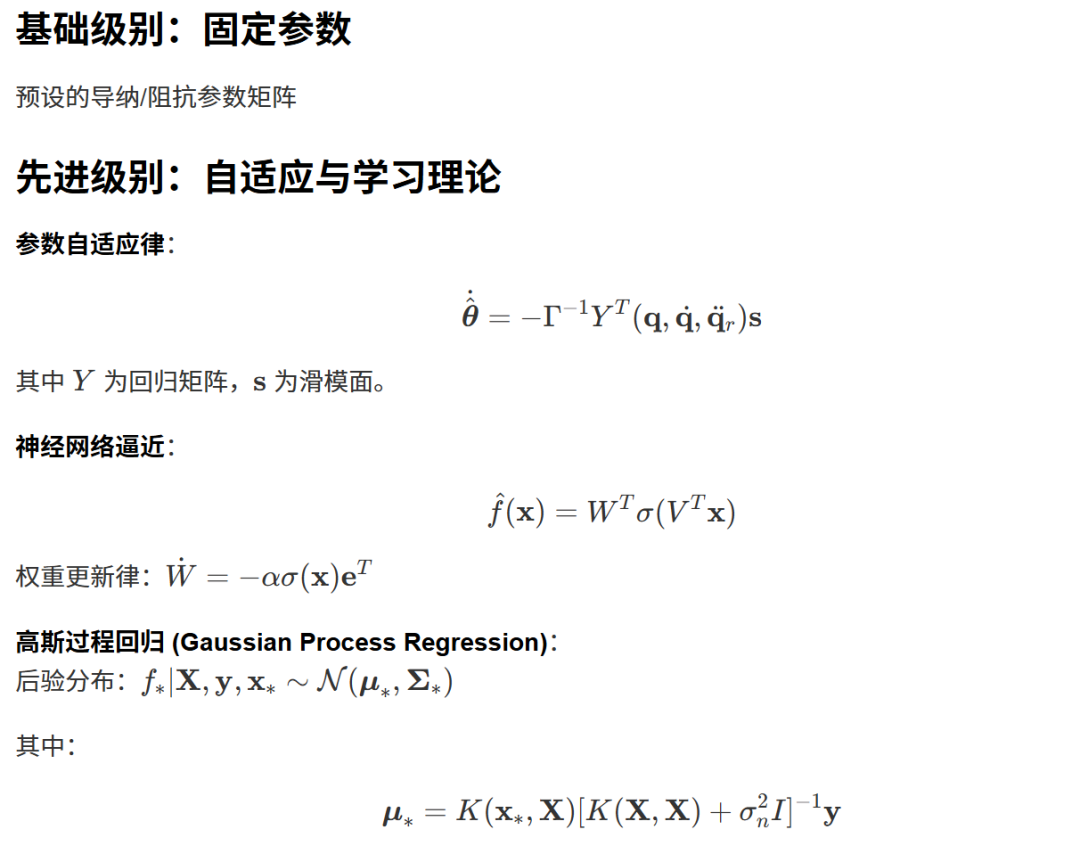
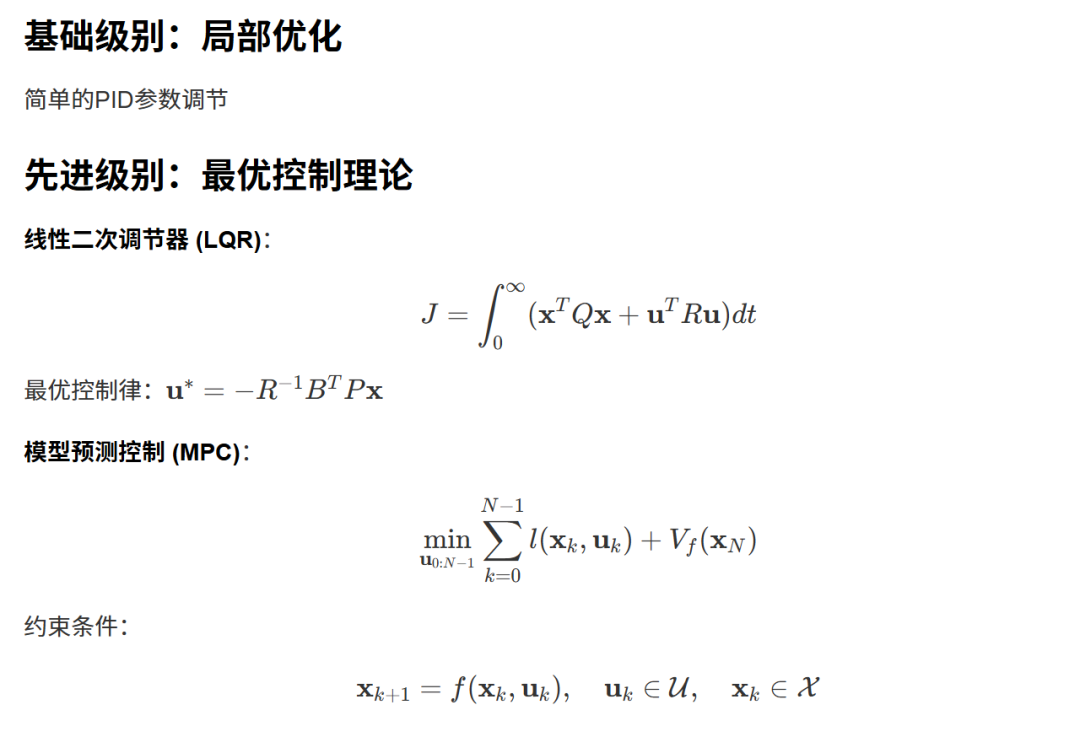
6. 优化理论层次
总结:技术层次的数学表征
理论维度 | 基础级别 | 先进级别 |
|---|---|---|
几何表示 | 欧几里得几何 | 李群/李代数 |
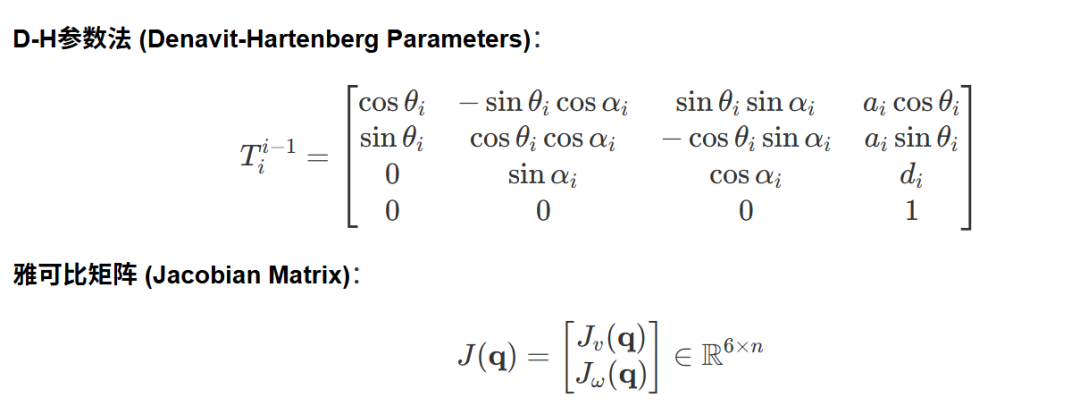
运动学 | D-H参数 | 旋量理论 |
动力学 | 拉格朗日方程 | 几何动力学 |
控制理论 | PID控制 | 几何控制/最优控制 |
估计理论 | 静态估计 | 状态观测器/滤波器 |
学习能力 | 无 | 自适应/神经网络/GP |
这些数学工具的复杂程度直接反映了系统的技术先进性水平!

















 3103
3103

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









