



一个线激光点云处理工具类,它包含了一系列的方法用于处理和分析线激光扫描得到的点云数据。提供的功能包括:
通过文件或直接数据设置点云。
计算线激光在机器人坐标系下的精度,输出内点的平均距离、最大距离、最小距离、总点数和内点数。
提供了一种方法计算物体从当前位置回到地平面的变换矩阵。
能够计算线激光与垂直平面的角度,这对于确定线激光传感器的朝向非常有用。
工具类利用了pcl::sample_consensus::RANSAC算法和线模型(pcl::SampleConsensusModelLine<pcl::PointXYZ>)对线激光扫描得到的点云数据进行分析,从而完成精度测量、变换计算以及角度测定等任务。
--------------------函数-------------------
构造函数:创建一个新的点云指针,将成员变量原始点云初始化为新创建的点云。将成员变量原始点云共享给点云指针。
析构函数:空。
设置点云数据通过文件名读取点云文件:创建爱你一个点云对象,读取点云文件,将读取的点云复制到成员变量 原始点云。
设置点云数据,通过传入点云对象: 将传入的点云对象复制到成员变量。
获取点云的精度信息:计算线激光点云在机器人坐标系下的精度(通过内点索引)。输入包含高度直通滤波的参数和距离基准,最大容忍距离,输出内点的平均距离、最大距离、最小距离以及点数和内点数。创建直通滤波器,创建点云指针和滤波后点云指针,将原始点云复制到点云指针对象,设置滤波器的输入点云,设置滤波字段z,设置滤波范围,执行滤波操作得到滤波后点云。设置输入点云为滤波后点云,设置滤波字段x,设置滤波范围,执行滤波操作得到新的滤波后点云。获取滤波后点云的点数,初始化内点数、总距离、最大距离、最小距离。遍历滤波后的点云{ 获取一个点,更新最大距离(点的x坐标),更新最小距离,如果当前点的x坐标与标准距离的差值大于容差,则跳过。 累加距离,累加内点数。}。 计算平均距离,设置最大距离和最小距离。设置内点数。
获取回到地面的变换矩阵:调用外部函数,输入原始点云,z的(高度)最大最小值,x的(直径)最大最小值。最大局外点距离,得到变换矩阵。
获取墙面俯仰角(主要任务是通过拟合点云中的平面来计算墙面的俯仰角(pitch angle),并生成一个旋转矩阵 T,将拟合的平面对齐到水平面): 初始化变换矩阵为单位矩阵,一个墙面上最少有20个点。创建滤波后点云指针,遍历输入点云,去除那些接近原点的点(即 x, y, z 坐标都接近 0 的点),并将剩余的点添加到 滤波后点云 中 . 拟合平面[ 定义平面模型的系数, 创建 ModelCoefficients 和 PointIndices 指针,分别用于存储平面模型的系数和内点的索引,创建 SACSegmentation 对象 seg,用于执行随机采样一致性(RANSAC)算法来拟合平面,设置 seg 的参数(优化模型系数,模型类型为平面,使用RANSAC方法,距离阈值 ),执行分割,如果没有找到平面模型,打印错误并返回,获取平面模型系数]。 计算旋转矩阵[ 根据平面系数设置初始法向量,目标法向量设置为0,0,1; 创建旋转矩阵] ,计算俯仰角。
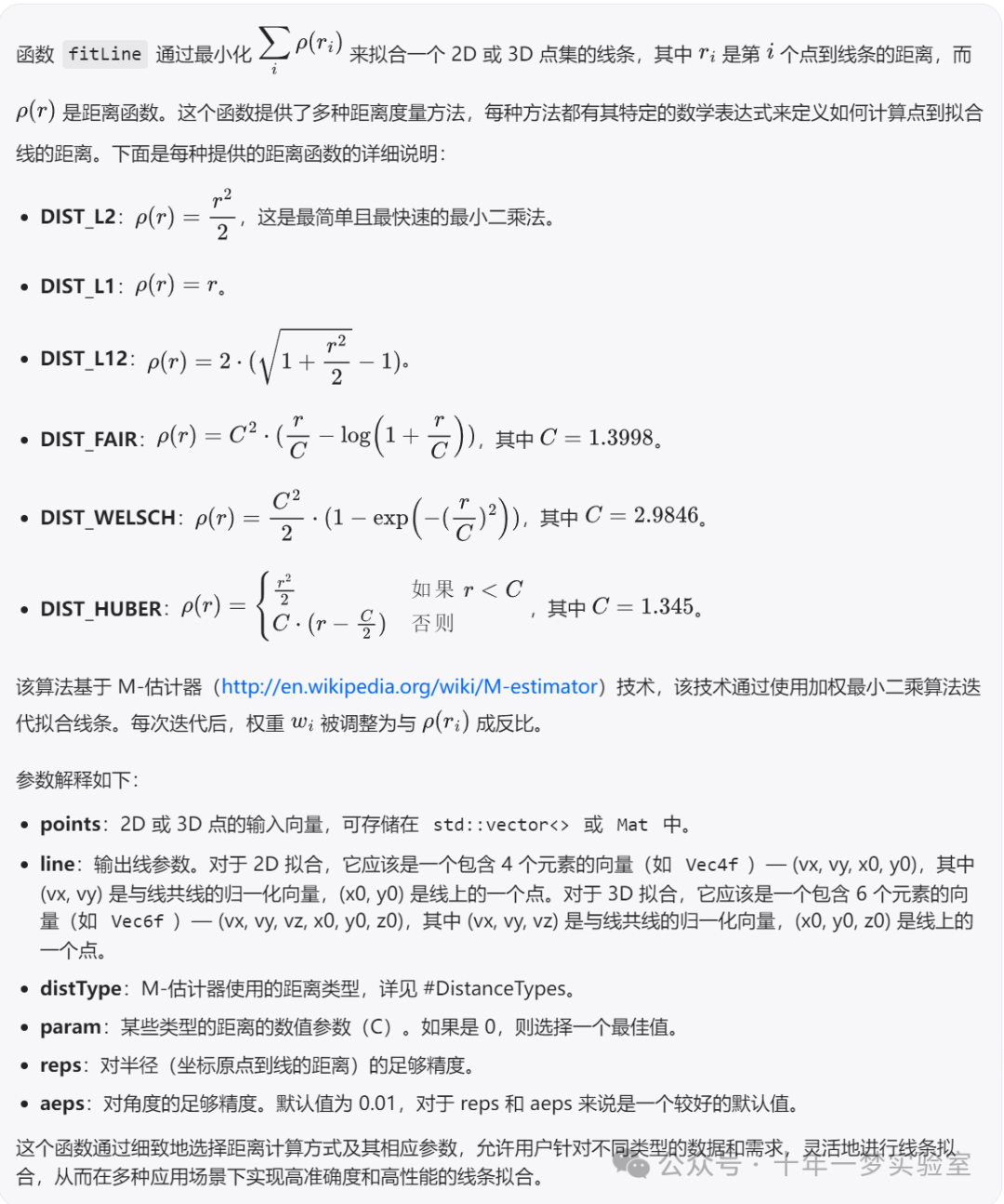
计算线激光与垂直平面角度: 创建滤波器和两个点云指针,复制输入点云到点云指针对象,滤波操作[对x轴执行滤波,保留距离正负δ范围的点,然后对z轴执行滤波,保留在最小最大z范围内的点]。检查点数并在ZOY平面上拟合直线。定义4维向量 光线参数(其中 (vx, vy) 是与线共线的归一化向量,(x0, y0) 是线上的一个点。),光线点向量,遍历滤波后点云,将点坐标(y,z) 添加到光线点向量。使用cv::fitLine为光条中心点进行直线拟合。输出光线参数。根据光线参数获取点斜式的点和斜率[如果 vy 非常小(接近于0),则认为直线与 x 轴平行,角度为0. 使用 atan2f 函数计算直线方向向量的角度,将角度从弧度转换为度数。根据角度的正负值调整角度,使其符合常规定义]。
Five Facts Lidar Companies Don't Want You To Know
https://www.youtube.com/watch?v=VuO3-TRuAP0&ab_channel=HesaiTechnology

















 806
806

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









