



 本文介绍了如何使用ESP32通过ROS2实时发送字符串来控制turtlesim的移动,并展示了一个实例,包括如何设置LED灯和编写速度指令代码,以实现精确的线速度和角速度控制。
本文介绍了如何使用ESP32通过ROS2实时发送字符串来控制turtlesim的移动,并展示了一个实例,包括如何设置LED灯和编写速度指令代码,以实现精确的线速度和角速度控制。
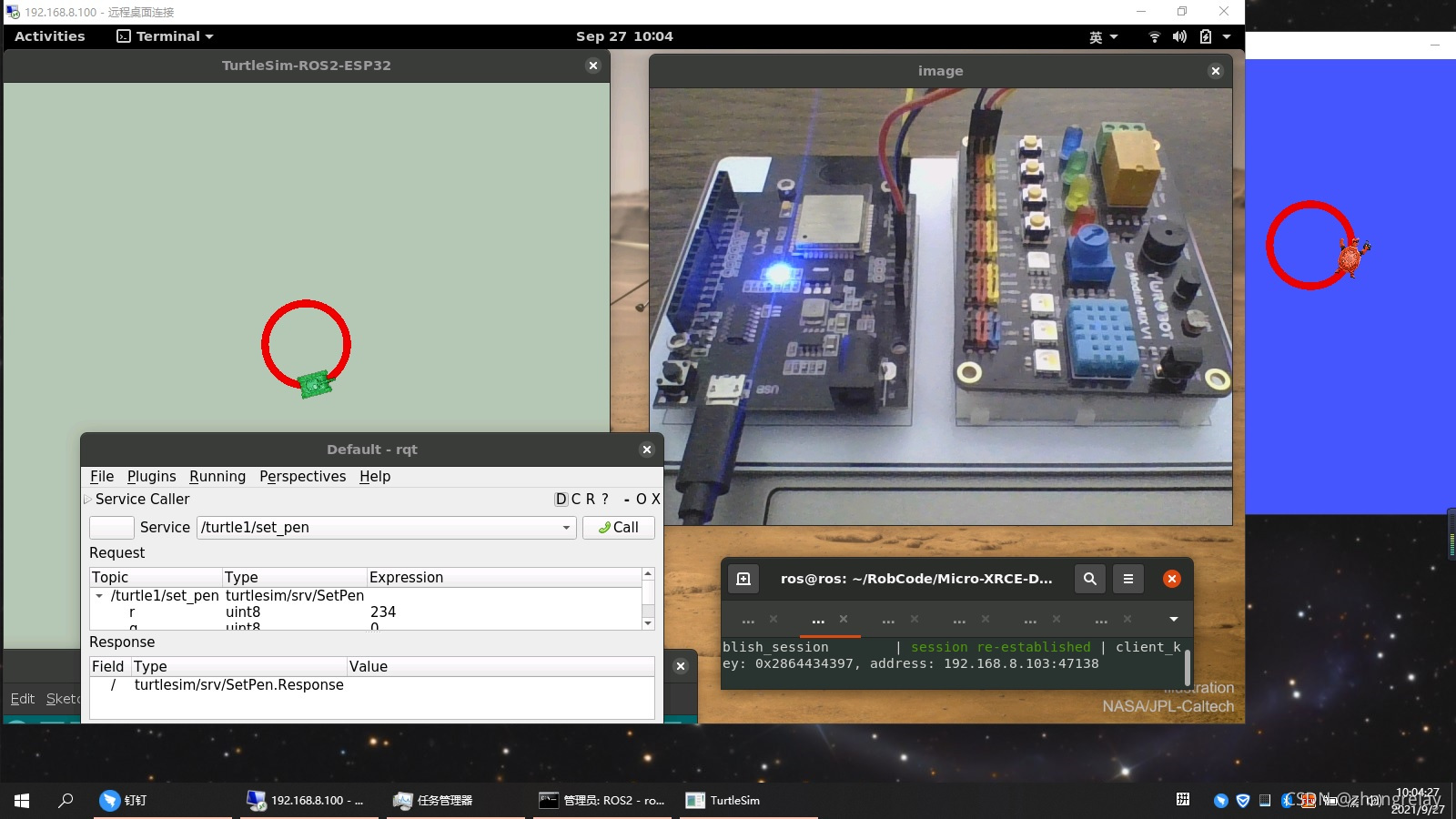
直播课演示如下,从点亮一个小灯,发送字符串到发布速度指令控制turtlesim。
字符串参考:
eps32和ros2之稳稳点亮一个LED灯(IO4)_zhangrelay的专栏-优快云博客
速度代码如下:
#include <ros2arduino.h>
#include <WiFi.h>
#include <WiFiUdp.h>
#define SSID "***"
#define SSID_PW "***"
#define AGENT_IP "***"
#define AGENT_PORT 2021 //AGENT port number
#define PUBLISH_FREQUENCY 2 //hz
void publishVel(geometry_msgs::Twist* vel, void* arg)
{
(void)(arg);
static int cnt = 0;
vel->linear.x = 0.1+0.01*cnt; //线速度
vel->angular.z = 0.1+0.01*cnt; //角速度
// vel->linear.x = ((double)rand()/(RAND_MAX)); //随机线速度
// vel->angular.z = ((double)rand()/(RAND_MAX)); //随机角速度
// vel->linear.x = 0.2; //固定线速度
// vel->angular.z = 1.0 - 0.001*cnt; //变化角速度
cnt++;
}
class VelPub : public ros2::Node
{
public:
VelPub()
: Node("esp32_cmdvel")
{
ros2::Publisher<geometry_msgs::Twist>* publisher_ = this->createPublisher<geometry_msgs::Twist>("turtle1/cmd_vel");
this->createWallFreq(PUBLISH_FREQUENCY, (ros2::CallbackFunc)publishVel, nullptr, publisher_);
}
};
WiFiUDP udp;
void setup()
{
WiFi.begin(SSID, SSID_PW);
while(WiFi.status() != WL_CONNECTED);
ros2::init(&udp, AGENT_IP, AGENT_PORT);
}
void loop()
{
static VelPub VelNode;
ros2::spin(&VelNode);
}


















 9781
9781

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











